 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEVIO: Lightweight Embedded Visual Inertial Odometry for Resource-Constrained Devices
Feb 03, 2026Accurate, infrastructure-less sensor systems for motion tracking are essential for mobile robotics and augmented reality (AR) applications. The most popular state-of-the-art visual-inertial odometry (VIO) systems, however, are too computationally demanding for resource-constrained hardware, such as micro-drones and smart glasses. This work presents LEVIO, a fully featured VIO pipeline optimized for ultra-low-power compute platforms, allowing six-degrees-of-freedom (DoF) real-time sensing. LEVIO incorporates established VIO components such as Oriented FAST and Rotated BRIEF (ORB) feature tracking and bundle adjustment, while emphasizing a computationally efficient architecture with parallelization and low memory usage to suit embedded microcontrollers and low-power systems-on-chip (SoCs). The paper proposes and details the algorithmic design choices and the hardware-software co-optimization approach, and presents real-time performance on resource-constrained hardware. LEVIO is validated on a parallel-processing ultra-low-power RISC-V SoC, achieving 20 FPS while consuming less than 100 mW, and benchmarked against public VIO datasets, offering a compelling balance between efficiency and accuracy. To facilitate reproducibility and adoption, the complete implementation is released as open-source.
* This article has been accepted for publication in the IEEE Sensors Journal (JSEN)
Planar Velocity Estimation for Fast-Moving Mobile Robots Using Event-Based Optical Flow
May 16, 2025Accurate velocity estimation is critical in mobile robotics, particularly for driver assistance systems and autonomous driving. Wheel odometry fused with Inertial Measurement Unit (IMU) data is a widely used method for velocity estimation; however, it typically requires strong assumptions, such as non-slip steering, or complex vehicle dynamics models that do not hold under varying environmental conditions like slippery surfaces. We introduce an approach to velocity estimation that is decoupled from wheel-to-surface traction assumptions by leveraging planar kinematics in combination with optical flow from event cameras pointed perpendicularly at the ground. The asynchronous micro-second latency and high dynamic range of event cameras make them highly robust to motion blur, a common challenge in vision-based perception techniques for autonomous driving. The proposed method is evaluated through in-field experiments on a 1:10 scale autonomous racing platform and compared to precise motion capture data, demonstrating not only performance on par with the state-of-the-art Event-VIO method but also a 38.3 % improvement in lateral error. Qualitative experiments at highway speeds of up to 32 m/s further confirm the effectiveness of our approach, indicating significant potential for real-world deployment.
Low Latency Visual Inertial Odometry with On-Sensor Accelerated Optical Flow for Resource-Constrained UAVs
Jun 19, 2024Visual Inertial Odometry (VIO) is the task of estimating the movement trajectory of an agent from an onboard camera stream fused with additional Inertial Measurement Unit (IMU) measurements. A crucial subtask within VIO is the tracking of features, which can be achieved through Optical Flow (OF). As the calculation of OF is a resource-demanding task in terms of computational load and memory footprint, which needs to be executed at low latency, especially in robotic applications, OF estimation is today performed on powerful CPUs or GPUs. This restricts its use in a broad spectrum of applications where the deployment of such powerful, power-hungry processors is unfeasible due to constraints related to cost, size, and power consumption. On-sensor hardware acceleration is a promising approach to enable low latency VIO even on resource-constrained devices such as nano drones. This paper assesses the speed-up in a VIO sensor system exploiting a compact OF sensor consisting of a global shutter camera and an Application Specific Integrated Circuit (ASIC). By replacing the feature tracking logic of the VINS-Mono pipeline with data from this OF camera, we demonstrate a 49.4% reduction in latency and a 53.7% reduction of compute load of the VIO pipeline over the original VINS-Mono implementation, allowing VINS-Mono operation up to 50 FPS instead of 20 FPS on the quad-core ARM Cortex-A72 processor of a Raspberry Pi Compute Module 4.
CR3DT: Camera-RADAR Fusion for 3D Detection and Tracking
Mar 22, 2024



Accurate detection and tracking of surrounding objects is essential to enable self-driving vehicles. While Light Detection and Ranging (LiDAR) sensors have set the benchmark for high performance, the appeal of camera-only solutions lies in their cost-effectiveness. Notably, despite the prevalent use of Radio Detection and Ranging (RADAR) sensors in automotive systems, their potential in 3D detection and tracking has been largely disregarded due to data sparsity and measurement noise. As a recent development, the combination of RADARs and cameras is emerging as a promising solution. This paper presents Camera-RADAR 3D Detection and Tracking (CR3DT), a camera-RADAR fusion model for 3D object detection, and Multi-Object Tracking (MOT). Building upon the foundations of the State-of-the-Art (SotA) camera-only BEVDet architecture, CR3DT demonstrates substantial improvements in both detection and tracking capabilities, by incorporating the spatial and velocity information of the RADAR sensor. Experimental results demonstrate an absolute improvement in detection performance of 5.3% in mean Average Precision (mAP) and a 14.9% increase in Average Multi-Object Tracking Accuracy (AMOTA) on the nuScenes dataset when leveraging both modalities. CR3DT bridges the gap between high-performance and cost-effective perception systems in autonomous driving, by capitalizing on the ubiquitous presence of RADAR in automotive applications.
ForzaETH Race Stack -- Scaled Autonomous Head-to-Head Racing on Fully Commercial off-the-Shelf Hardware
Mar 18, 2024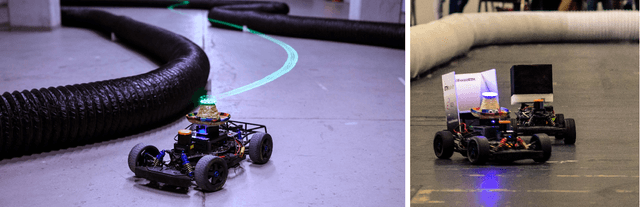
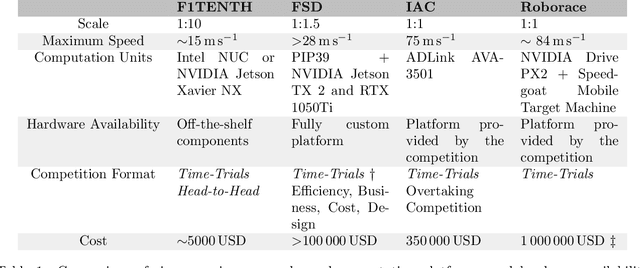
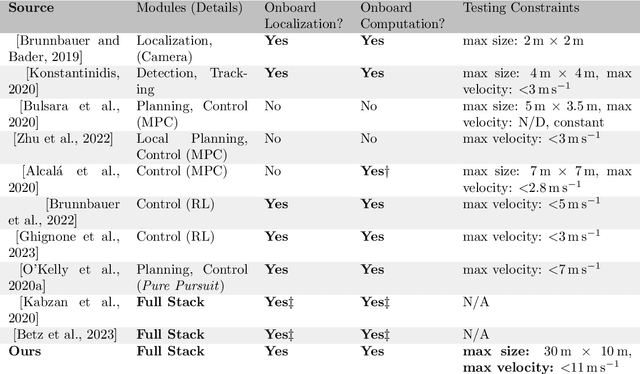
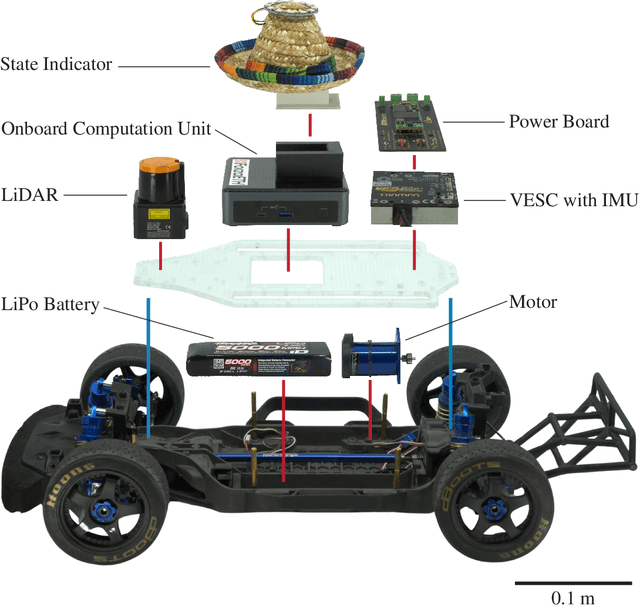
Autonomous racing in robotics combines high-speed dynamics with the necessity for reliability and real-time decision-making. While such racing pushes software and hardware to their limits, many existing full-system solutions necessitate complex, custom hardware and software, and usually focus on Time-Trials rather than full unrestricted Head-to-Head racing, due to financial and safety constraints. This limits their reproducibility, making advancements and replication feasible mostly for well-resourced laboratories with comprehensive expertise in mechanical, electrical, and robotics fields. Researchers interested in the autonomy domain but with only partial experience in one of these fields, need to spend significant time with familiarization and integration. The ForzaETH Race Stack addresses this gap by providing an autonomous racing software platform designed for F1TENTH, a 1:10 scaled Head-to-Head autonomous racing competition, which simplifies replication by using commercial off-the-shelf hardware. This approach enhances the competitive aspect of autonomous racing and provides an accessible platform for research and development in the field. The ForzaETH Race Stack is designed with modularity and operational ease of use in mind, allowing customization and adaptability to various environmental conditions, such as track friction and layout. Capable of handling both Time-Trials and Head-to-Head racing, the stack has demonstrated its effectiveness, robustness, and adaptability in the field by winning the official F1TENTH international competition multiple times.
Towards Real-Time Fast Unmanned Aerial Vehicle Detection Using Dynamic Vision Sensors
Mar 18, 2024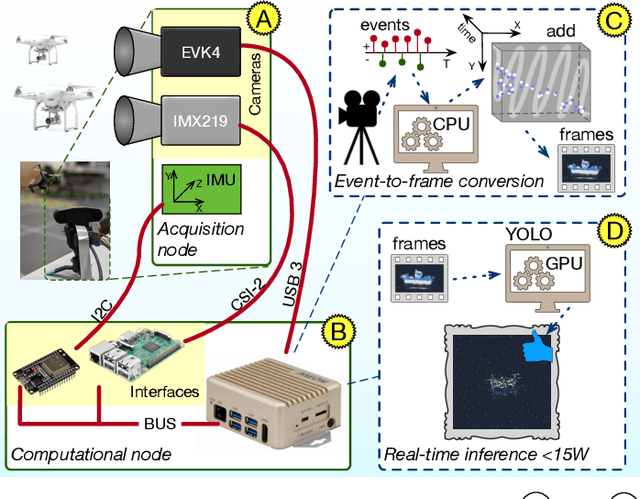
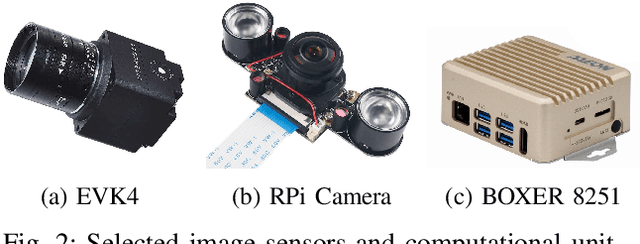
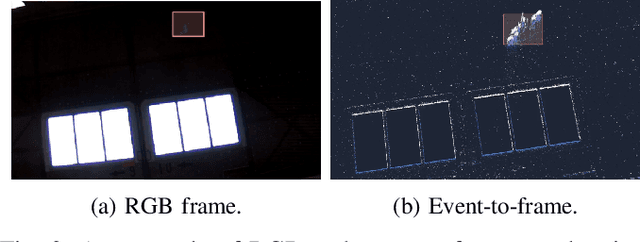
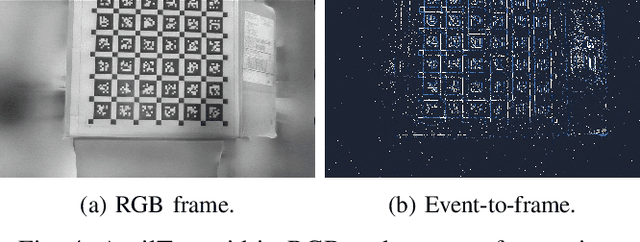
Unmanned Aerial Vehicles (UAVs) are gaining popularity in civil and military applications. However, uncontrolled access to restricted areas threatens privacy and security. Thus, prevention and detection of UAVs are pivotal to guarantee confidentiality and safety. Although active scanning, mainly based on radars, is one of the most accurate technologies, it can be expensive and less versatile than passive inspections, e.g., object recognition. Dynamic vision sensors (DVS) are bio-inspired event-based vision models that leverage timestamped pixel-level brightness changes in fast-moving scenes that adapt well to low-latency object detection. This paper presents F-UAV-D (Fast Unmanned Aerial Vehicle Detector), an embedded system that enables fast-moving drone detection. In particular, we propose a setup to exploit DVS as an alternative to RGB cameras in a real-time and low-power configuration. Our approach leverages the high-dynamic range (HDR) and background suppression of DVS and, when trained with various fast-moving drones, outperforms RGB input in suboptimal ambient conditions such as low illumination and fast-moving scenes. Our results show that F-UAV-D can (i) detect drones by using less than <15 W on average and (ii) perform real-time inference (i.e., <50 ms) by leveraging the CPU and GPU nodes of our edge computer.
Parallelizing Optical Flow Estimation on an Ultra-Low Power RISC-V Cluster for Nano-UAV Navigation
May 22, 2023Optical flow estimation is crucial for autonomous navigation and localization of unmanned aerial vehicles (UAV). On micro and nano UAVs, real-time calculation of the optical flow is run on low power and resource-constrained microcontroller units (MCUs). Thus, lightweight algorithms for optical flow have been proposed targeting real-time execution on traditional single-core MCUs. This paper introduces an efficient parallelization strategy for optical flow computation targeting new-generation multicore low power RISC-V based microcontroller units. Our approach enables higher frame rates at lower clock speeds. It has been implemented and evaluated on the eight-core cluster of a commercial octa-core MCU (GAP8) reaching a parallelization speedup factor of 7.21 allowing for a frame rate of 500 frames per second when running on a 50 MHz clock frequency. The proposed parallel algorithm significantly boosts the camera frame rate on micro unmanned aerial vehicles, which enables higher flight speeds: the maximum flight speed can be doubled, while using less than a third of the clock frequency of previous single-core implementations.
A Fast and Accurate Optical Flow Camera for Resource-Constrained Edge Applications
May 22, 2023Optical Flow (OF) is the movement pattern of pixels or edges that is caused in a visual scene by the relative motion between an agent and a scene. OF is used in a wide range of computer vision algorithms and robotics applications. While the calculation of OF is a resource-demanding task in terms of computational load and memory footprint, it needs to be executed at low latency, especially in robotics applications. Therefore, OF estimation is today performed on powerful CPUs or GPUs to satisfy the stringent requirements in terms of execution speed for control and actuation. On-sensor hardware acceleration is a promising approach to enable low latency OF calculations and fast execution even on resource-constrained devices such as nano drones and AR/VR glasses and headsets. This paper analyzes the achievable accuracy, frame rate, and power consumption when using a novel optical flow sensor consisting of a global shutter camera with an Application Specific Integrated Circuit (ASIC) for optical flow computation. The paper characterizes the optical flow sensor in high frame-rate, low-latency settings, with a frame rate of up to 88 fps at the full resolution of 1124 by 1364 pixels and up to 240 fps at a reduced camera resolution of 280 by 336, for both classical camera images and optical flow data.