 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Real-Time Fast Unmanned Aerial Vehicle Detection Using Dynamic Vision Sensors
Mar 18, 2024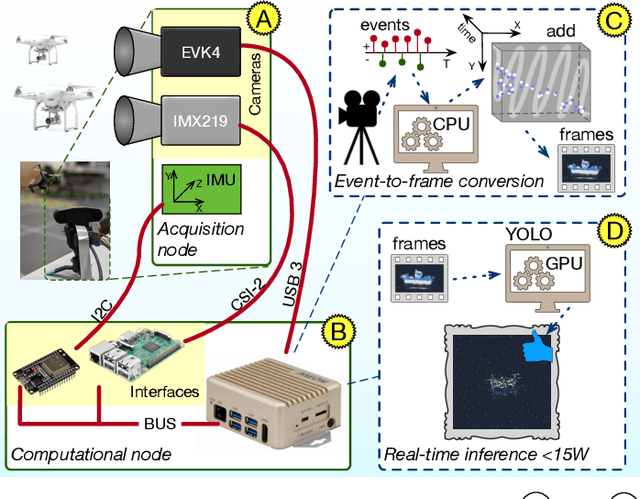
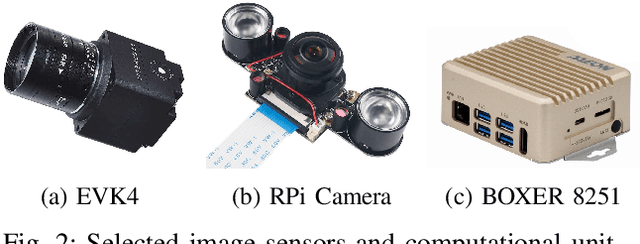
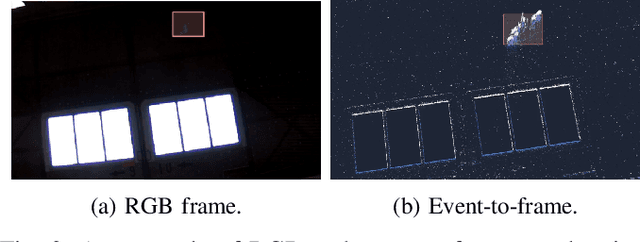
Unmanned Aerial Vehicles (UAVs) are gaining popularity in civil and military applications. However, uncontrolled access to restricted areas threatens privacy and security. Thus, prevention and detection of UAVs are pivotal to guarantee confidentiality and safety. Although active scanning, mainly based on radars, is one of the most accurate technologies, it can be expensive and less versatile than passive inspections, e.g., object recognition. Dynamic vision sensors (DVS) are bio-inspired event-based vision models that leverage timestamped pixel-level brightness changes in fast-moving scenes that adapt well to low-latency object detection. This paper presents F-UAV-D (Fast Unmanned Aerial Vehicle Detector), an embedded system that enables fast-moving drone detection. In particular, we propose a setup to exploit DVS as an alternative to RGB cameras in a real-time and low-power configuration. Our approach leverages the high-dynamic range (HDR) and background suppression of DVS and, when trained with various fast-moving drones, outperforms RGB input in suboptimal ambient conditions such as low illumination and fast-moving scenes. Our results show that F-UAV-D can (i) detect drones by using less than <15 W on average and (ii) perform real-time inference (i.e., <50 ms) by leveraging the CPU and GPU nodes of our edge computer.
Quantitative Evaluation of a Multi-Modal Camera Setup for Fusing Event Data with RGB Images
Nov 03, 2023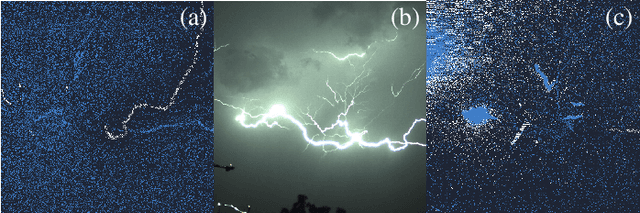
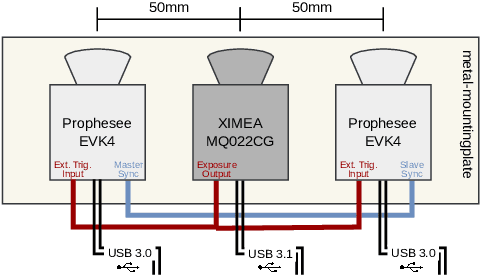
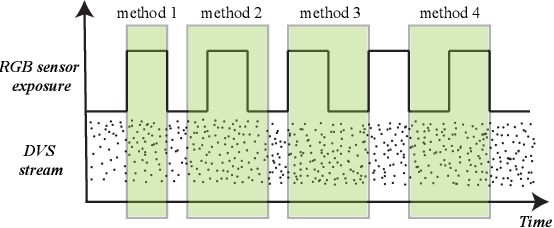
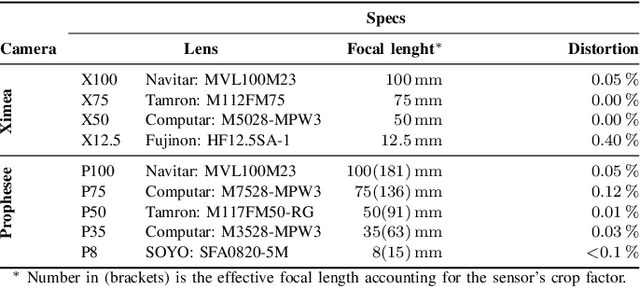
Event-based cameras, also called silicon retinas, potentially revolutionize computer vision by detecting and reporting significant changes in intensity asynchronous events, offering extended dynamic range, low latency, and low power consumption, enabling a wide range of applications from autonomous driving to longtime surveillance. As an emerging technology, there is a notable scarcity of publicly available datasets for event-based systems that also feature frame-based cameras, in order to exploit the benefits of both technologies. This work quantitatively evaluates a multi-modal camera setup for fusing high-resolution DVS data with RGB image data by static camera alignment. The proposed setup, which is intended for semi-automatic DVS data labeling, combines two recently released Prophesee EVK4 DVS cameras and one global shutter XIMEA MQ022CG-CM RGB camera. After alignment, state-of-the-art object detection or segmentation networks label the image data by mapping boundary boxes or labeled pixels directly to the aligned events. To facilitate this process, various time-based synchronization methods for DVS data are analyzed, and calibration accuracy, camera alignment, and lens impact are evaluated. Experimental results demonstrate the benefits of the proposed system: the best synchronization method yields an image calibration error of less than 0.90px and a pixel cross-correlation deviation of1.6px, while a lens with 8mm focal length enables detection of objects with size 30cm at a distance of 350m against homogeneous background.