 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWavesFM: Hierarchical Representation Learning for Longitudinal Wearable Sensor Waveforms
May 09, 2026Wearable sensors enable the continuous acquisition of high-resolution physiological waveforms, such as photoplethysmography and accelerometry, under free-living conditions. However, inferring health-related phenotypes from these signals presents significant challenges due to high sampling frequencies, multimodal dependencies, and extreme sequence lengths (e.g., weeks of recordings), compounded by a scarcity of ground-truth labels. To address these challenges, existing self-supervised learning (SSL) methodologies typically follow two paradigms: (1) learning rich morphological representations from short waveform segments while collapsing longitudinal dynamics through simple aggregation, or (2) modeling behavioral patterns from coarse, hand-crafted features (e.g. heart rate, step counts) spanning longer horizons but foregoing subtle, predictive signatures in raw waveforms. To bridge this gap, we propose WavesFM, a foundation model utilizing a two-stage SSL framework for longitudinal physiological data. Specifically, we decompose the learning problem into two stages: first, a segment-level encoder is pretrained to extract local embeddings from short waveforms; subsequently, a temporal encoder is trained to model the sequence of these embeddings across a multi-day horizon. This hierarchical approach overcomes the computational complexity of high-resolution, long-sequence data, allowing the overall model to capture both local signal semantics and the complex circadian and inter-day variations governing physiological dynamics. Pretrained on over 6.8M hours (N=324k individuals) of recordings for the first stage and 5.3M hours (N=10k) for the second stage, WavesFM demonstrates superior performance across 58 diverse tasks spanning demographics, lifestyle, health conditions, and medications.
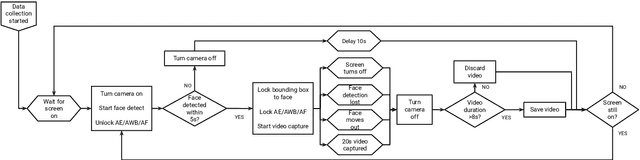
Smartphone monitoring of smiling as a behavioral proxy of well-being in everyday life
Dec 10, 2025Subjective well-being is a cornerstone of individual and societal health, yet its scientific measurement has traditionally relied on self-report methods prone to recall bias and high participant burden. This has left a gap in our understanding of well-being as it is expressed in everyday life. We hypothesized that candid smiles captured during natural smartphone interactions could serve as a scalable, objective behavioral correlate of positive affect. To test this, we analyzed 405,448 video clips passively recorded from 233 consented participants over one week. Using a deep learning model to quantify smile intensity, we identified distinct diurnal and daily patterns. Daily patterns of smile intensity across the week showed strong correlation with national survey data on happiness (r=0.92), and diurnal rhythms documented close correspondence with established results from the day reconstruction method (r=0.80). Higher daily mean smile intensity was significantly associated with more physical activity (Beta coefficient = 0.043, 95% CI [0.001, 0.085]) and greater light exposure (Beta coefficient = 0.038, [0.013, 0.063]), whereas no significant effects were found for smartphone use. These findings suggest that passive smartphone sensing could serve as a powerful, ecologically valid methodology for studying the dynamics of affective behavior and open the door to understanding this behavior at a population scale.
Passive Heart Rate Monitoring During Smartphone Use in Everyday Life
Mar 04, 2025


Resting heart rate (RHR) is an important biomarker of cardiovascular health and mortality, but tracking it longitudinally generally requires a wearable device, limiting its availability. We present PHRM, a deep learning system for passive heart rate (HR) and RHR measurements during everyday smartphone use, using facial video-based photoplethysmography. Our system was developed using 225,773 videos from 495 participants and validated on 185,970 videos from 205 participants in laboratory and free-living conditions, representing the largest validation study of its kind. Compared to reference electrocardiogram, PHRM achieved a mean absolute percentage error (MAPE) < 10% for HR measurements across three skin tone groups of light, medium and dark pigmentation; MAPE for each skin tone group was non-inferior versus the others. Daily RHR measured by PHRM had a mean absolute error < 5 bpm compared to a wearable HR tracker, and was associated with known risk factors. These results highlight the potential of smartphones to enable passive and equitable heart health monitoring.
RLPP: A Residual Method for Zero-Shot Real-World Autonomous Racing on Scaled Platforms
Jan 28, 2025



Autonomous racing presents a complex environment requiring robust controllers capable of making rapid decisions under dynamic conditions. While traditional controllers based on tire models are reliable, they often demand extensive tuning or system identification. RL methods offer significant potential due to their ability to learn directly from interaction, yet they typically suffer from the Sim-to-Reall gap, where policies trained in simulation fail to perform effectively in the real world. In this paper, we propose RLPP, a residual RL framework that enhances a PP controller with an RL-based residual. This hybrid approach leverages the reliability and interpretability of PP while using RL to fine-tune the controller's performance in real-world scenarios. Extensive testing on the F1TENTH platform demonstrates that RLPP improves lap times by up to 6.37 %, closing the gap to the SotA methods by more than 52 % and providing reliable performance in zero-shot real-world deployment, overcoming key challenges associated with the Sim-to-Real transfer and reducing the performance gap from simulation to reality by more than 8-fold when compared to the baseline RL controller. The RLPP framework is made available as an open-source tool, encouraging further exploration and advancement in autonomous racing research. The code is available at: www.github.com/forzaeth/rlpp.
Self-Supervised Learning of Dynamic Planar Manipulation of Free-End Cables
May 15, 2024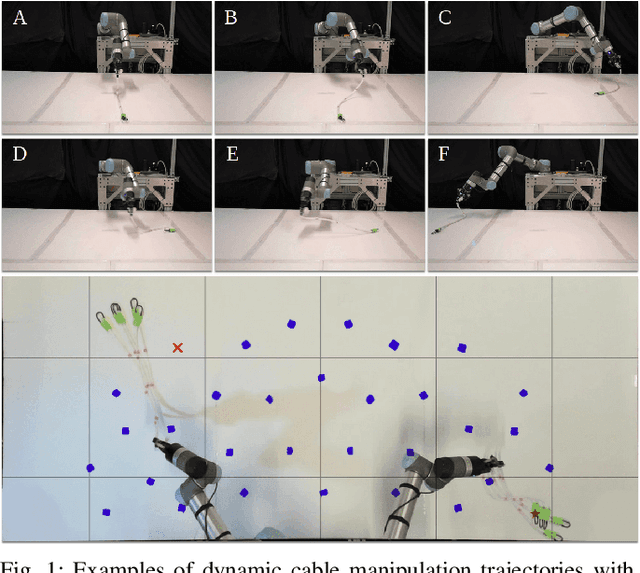

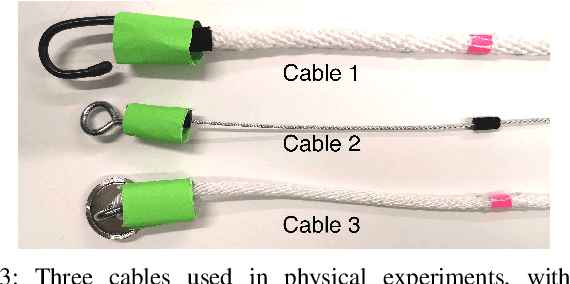
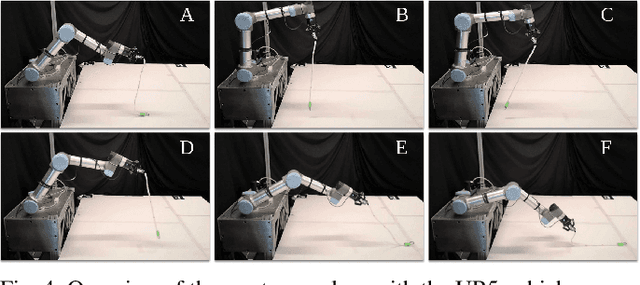
Dynamic manipulation of free-end cables has applications for cable management in homes, warehouses and manufacturing plants. We present a supervised learning approach for dynamic manipulation of free-end cables, focusing on the problem of getting the cable endpoint to a designated target position, which may lie outside the reachable workspace of the robot end effector. We present a simulator, tune it to closely match experiments with physical cables, and then collect training data for learning dynamic cable manipulation. We evaluate with 3 cables and a physical UR5 robot. Results over 32x5 trials on 3 cables suggest that a physical UR5 robot can attain a median error distance ranging from 22% to 35% of the cable length among cables, outperforming an analytic baseline by 21% and a Gaussian Process baseline by 7% with lower interquartile range (IQR).
Physics-based parameterized neural ordinary differential equations: prediction of laser ignition in a rocket combustor
Feb 16, 2023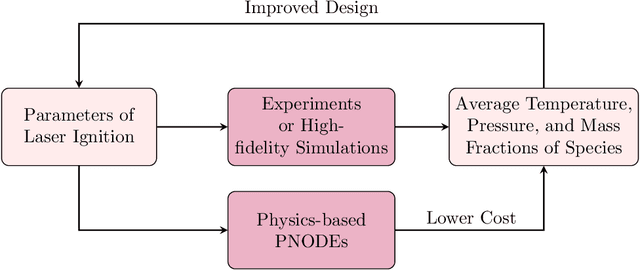



In this work, we present a novel physics-based data-driven framework for reduced-order modeling of laser ignition in a model rocket combustor based on parameterized neural ordinary differential equations (PNODE). Deep neural networks are embedded as functions of high-dimensional parameters of laser ignition to predict various terms in a 0D flow model including the heat source function, pre-exponential factors, and activation energy. Using the governing equations of a 0D flow model, our PNODE needs only a limited number of training samples and predicts trajectories of various quantities such as temperature, pressure, and mass fractions of species while satisfying physical constraints. We validate our physics-based PNODE on solution snapshots of high-fidelity Computational Fluid Dynamics (CFD) simulations of laser-induced ignition in a prototype rocket combustor. We compare the performance of our physics-based PNODE with that of kernel ridge regression and fully connected neural networks. Our results show that our physics-based PNODE provides solutions with lower mean absolute errors of average temperature over time, thus improving the prediction of successful laser ignition with high-dimensional parameters.
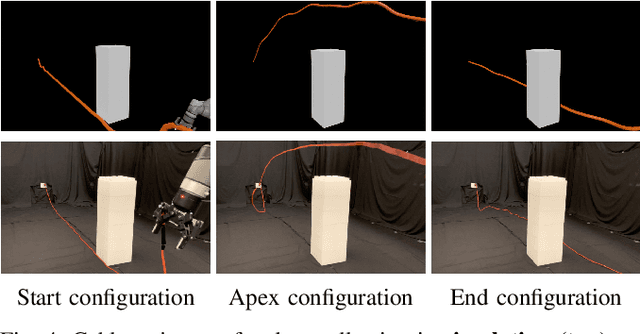
Planar Robot Casting with Real2Sim2Real Self-Supervised Learning
Nov 08, 2021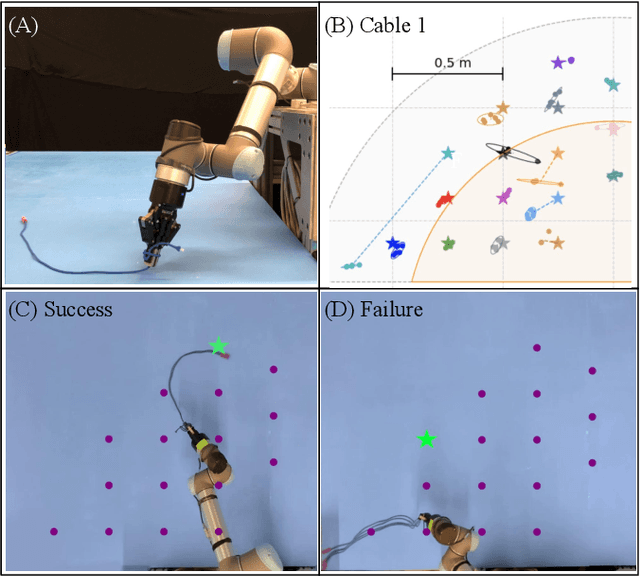
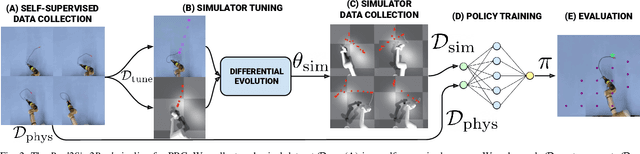
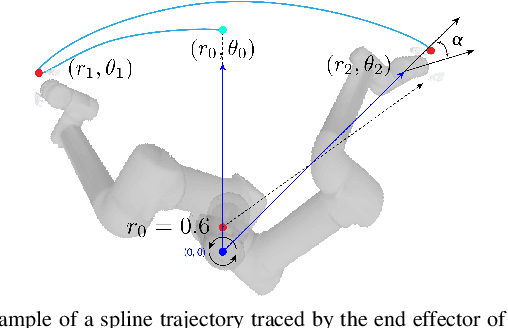
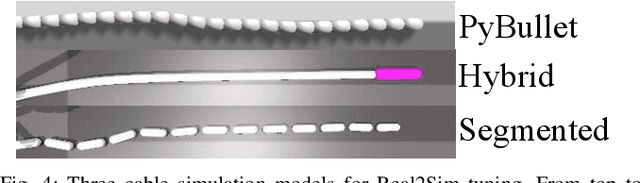
Manipulation of deformable objects using a single parameterized dynamic action can be useful for tasks such as fly fishing, lofting a blanket, and playing shuffleboard. Such tasks take as input a desired final state and output one parameterized open-loop dynamic robot action which produces a trajectory toward the final state. This is especially challenging for long-horizon trajectories with complex dynamics involving friction. This paper explores the task of Planar Robot Casting (PRC): where one planar motion of a robot wrist holding one end of a cable causes the other end to slide across the plane toward a desired target. PRC allows the cable to reach points beyond the robot's workspace and has applications for cable management in homes, warehouses, and factories. To efficiently learn a PRC policy for a given cable, we propose Real2Sim2Real, a self-supervised framework that automatically collects physical trajectory examples to tune parameters of a dynamics simulator using Differential Evolution, generates many simulated examples, and then learns a policy using a weighted combination of simulated and physical data. We evaluate Real2Sim2Real with three simulators, Isaac Gym-segmented, Isaac Gym-hybrid, and PyBullet, two function approximators, Gaussian Processes and Neural Networks (NNs), and three cables with differing stiffness, torsion, and friction. Results on 16 held-out test targets for each cable suggest that the NN PRC policies using Isaac Gym-segmented attain median error distance (as % of cable length) ranging from 8% to 14%, outperforming baselines and policies trained on only real or only simulated examples. Code, data, and videos are available at https://tinyurl.com/robotcast.
Robots of the Lost Arc: Learning to Dynamically Manipulate Fixed-Endpoint Ropes and Cables
Nov 10, 2020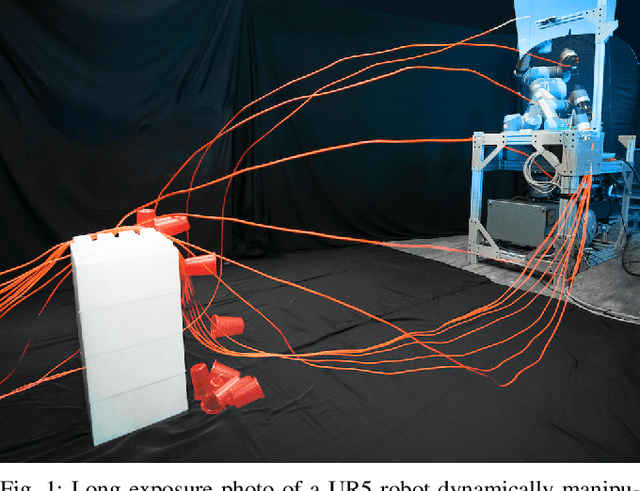
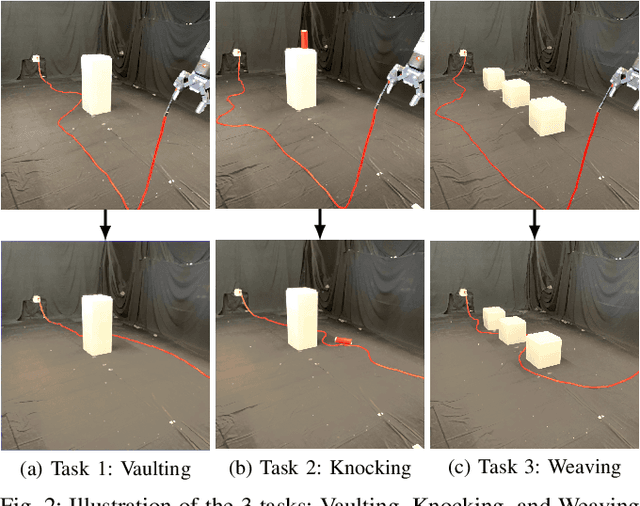
High-speed arm motions can dynamically manipulate ropes and cables to vault over obstacles, knock objects from pedestals, and weave between obstacles. In this paper, we propose a self-supervised learning pipeline that enables a UR5 robot to perform these three tasks. The pipeline trains a deep convolutional neural network that takes as input an image of the scene with object and target. It computes a 3D apex point for the robot arm, which, together with a task-specific trajectory function, defines an arcing motion for a manipulator arm to dynamically manipulate the cable to perform a task with varying obstacle and target locations. The trajectory function computes high-speed minimum-jerk arcing motions that are constrained to remain within joint limits and to travel through the 3D apex point by repeatedly solving quadratic programs for shorter time horizons to find the shortest and fastest feasible motion. We experiment with the proposed pipeline on 5 physical cables with different thickness and mass and compare performance with two baselines in which a human chooses the apex point. Results suggest that the robot using the learned apex point can achieve success rates of 81.7% in vaulting, 65.0% in knocking, and 60.0% in weaving, while a baseline with a fixed apex across the three tasks achieves respective success rates of 51.7%, 36.7%, and 15.0%, and a baseline with human-specified task-specific apex points achieves 66.7%, 56.7%, and 15.0% success rate respectively. Code, data, and supplementary materials are available at https: //sites.google.com/berkeley.edu/dynrope/home