 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanar Robot Casting with Real2Sim2Real Self-Supervised Learning
Paper and Code
Nov 08, 2021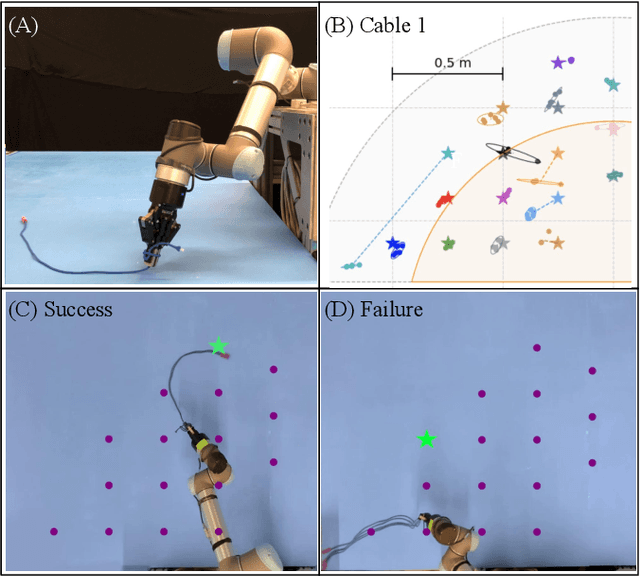
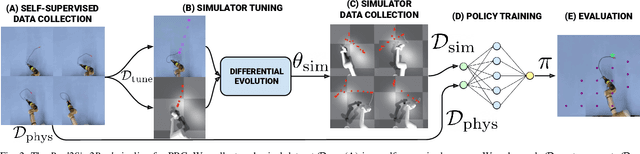
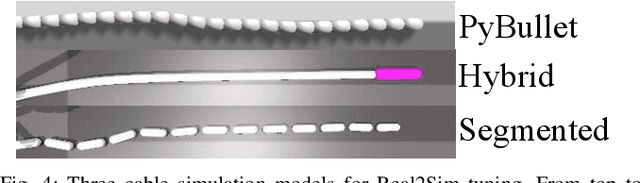
Manipulation of deformable objects using a single parameterized dynamic action can be useful for tasks such as fly fishing, lofting a blanket, and playing shuffleboard. Such tasks take as input a desired final state and output one parameterized open-loop dynamic robot action which produces a trajectory toward the final state. This is especially challenging for long-horizon trajectories with complex dynamics involving friction. This paper explores the task of Planar Robot Casting (PRC): where one planar motion of a robot wrist holding one end of a cable causes the other end to slide across the plane toward a desired target. PRC allows the cable to reach points beyond the robot's workspace and has applications for cable management in homes, warehouses, and factories. To efficiently learn a PRC policy for a given cable, we propose Real2Sim2Real, a self-supervised framework that automatically collects physical trajectory examples to tune parameters of a dynamics simulator using Differential Evolution, generates many simulated examples, and then learns a policy using a weighted combination of simulated and physical data. We evaluate Real2Sim2Real with three simulators, Isaac Gym-segmented, Isaac Gym-hybrid, and PyBullet, two function approximators, Gaussian Processes and Neural Networks (NNs), and three cables with differing stiffness, torsion, and friction. Results on 16 held-out test targets for each cable suggest that the NN PRC policies using Isaac Gym-segmented attain median error distance (as % of cable length) ranging from 8% to 14%, outperforming baselines and policies trained on only real or only simulated examples. Code, data, and videos are available at https://tinyurl.com/robotcast.