 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots of the Lost Arc: Learning to Dynamically Manipulate Fixed-Endpoint Ropes and Cables
Paper and Code
Nov 10, 2020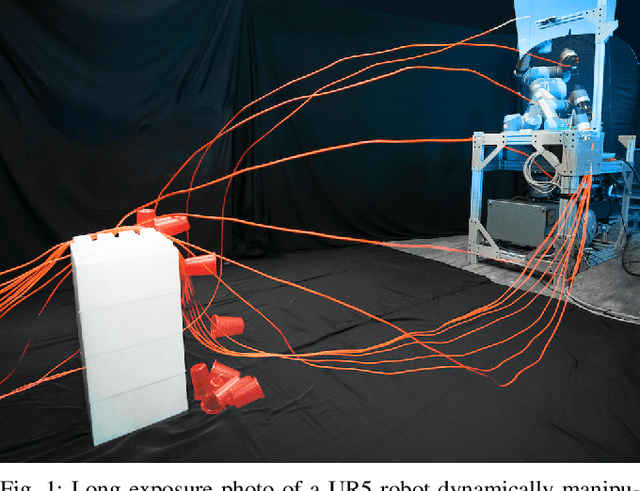
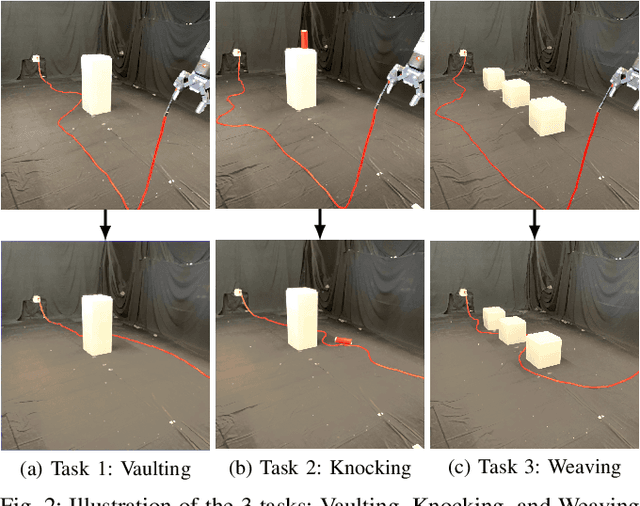
High-speed arm motions can dynamically manipulate ropes and cables to vault over obstacles, knock objects from pedestals, and weave between obstacles. In this paper, we propose a self-supervised learning pipeline that enables a UR5 robot to perform these three tasks. The pipeline trains a deep convolutional neural network that takes as input an image of the scene with object and target. It computes a 3D apex point for the robot arm, which, together with a task-specific trajectory function, defines an arcing motion for a manipulator arm to dynamically manipulate the cable to perform a task with varying obstacle and target locations. The trajectory function computes high-speed minimum-jerk arcing motions that are constrained to remain within joint limits and to travel through the 3D apex point by repeatedly solving quadratic programs for shorter time horizons to find the shortest and fastest feasible motion. We experiment with the proposed pipeline on 5 physical cables with different thickness and mass and compare performance with two baselines in which a human chooses the apex point. Results suggest that the robot using the learned apex point can achieve success rates of 81.7% in vaulting, 65.0% in knocking, and 60.0% in weaving, while a baseline with a fixed apex across the three tasks achieves respective success rates of 51.7%, 36.7%, and 15.0%, and a baseline with human-specified task-specific apex points achieves 66.7%, 56.7%, and 15.0% success rate respectively. Code, data, and supplementary materials are available at https: //sites.google.com/berkeley.edu/dynrope/home