 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDKMGP: A Gaussian Process Approach to Multi-Task and Multi-Step Vehicle Dynamics Modeling in Autonomous Racing
Nov 20, 2024



Autonomous racing is gaining attention for its potential to advance autonomous vehicle technologies. Accurate race car dynamics modeling is essential for capturing and predicting future states like position, orientation, and velocity. However, accurately modeling complex subsystems such as tires and suspension poses significant challenges. In this paper, we introduce the Deep Kernel-based Multi-task Gaussian Process (DKMGP), which leverages the structure of a variational multi-task and multi-step Gaussian process model enhanced with deep kernel learning for vehicle dynamics modeling. Unlike existing single-step methods, DKMGP performs multi-step corrections with an adaptive correction horizon (ACH) algorithm that dynamically adjusts to varying driving conditions. To validate and evaluate the proposed DKMGP method, we compare the model performance with DKL-SKIP and a well-tuned single-track model, using high-speed dynamics data (exceeding 230kmph) collected from a full-scale Indy race car during the Indy Autonomous Challenge held at the Las Vegas Motor Speedway at CES 2024. The results demonstrate that DKMGP achieves upto 99% prediction accuracy compared to one-step DKL-SKIP, while improving real-time computational efficiency by 1752x. Our results show that DKMGP is a scalable and efficient solution for vehicle dynamics modeling making it suitable for high-speed autonomous racing control.
Deep Dynamics: Vehicle Dynamics Modeling with a Physics-Informed Neural Network for Autonomous Racing
Dec 07, 2023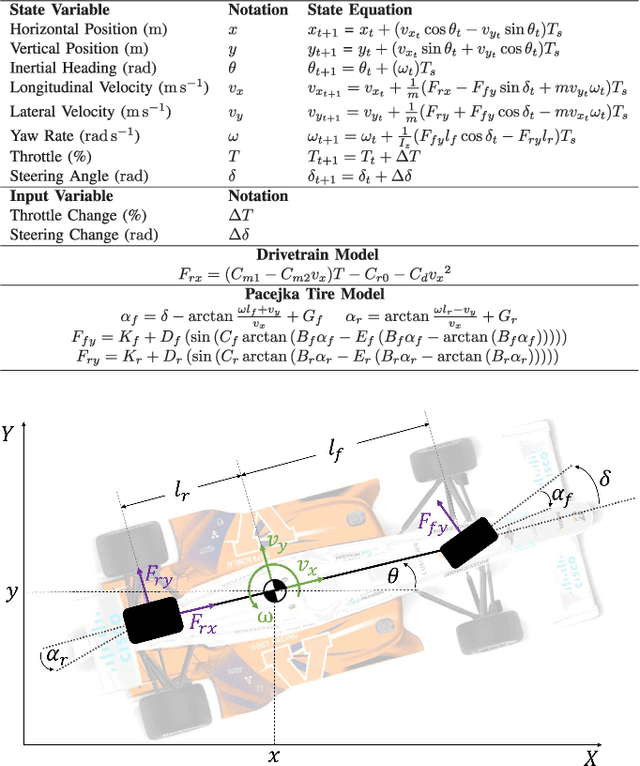
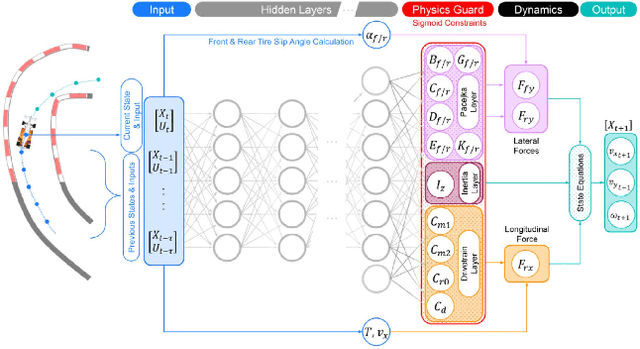
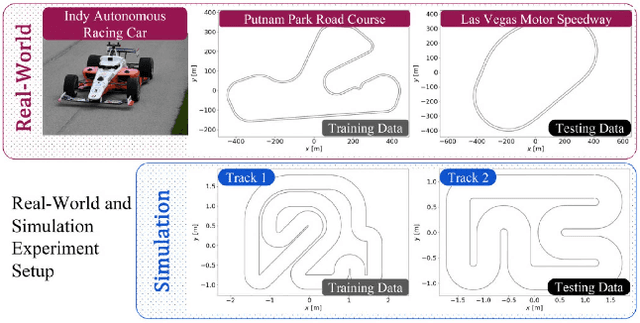
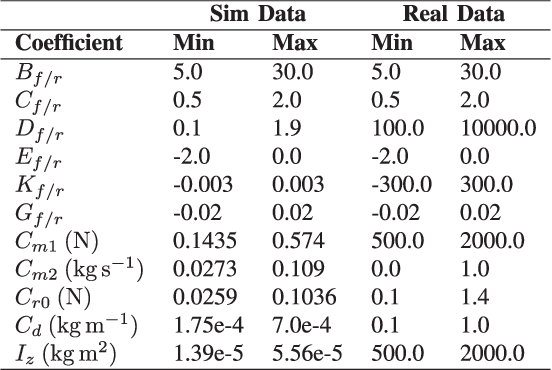
Autonomous racing is a critical research area for autonomous driving, presenting significant challenges in vehicle dynamics modeling, such as balancing model precision and computational efficiency at high speeds (>280kmph), where minor errors in modeling have severe consequences. Existing physics-based models for vehicle dynamics require elaborate testing setups and tuning, which are hard to implement, time-intensive, and cost-prohibitive. Conversely, purely data-driven approaches do not generalize well and cannot adequately ensure physical constraints on predictions. This paper introduces Deep Dynamics, a physics-informed neural network (PINN) for vehicle dynamics modeling of an autonomous racecar. It combines physics coefficient estimation and dynamical equations to accurately predict vehicle states at high speeds and includes a unique Physics Guard layer to ensure internal coefficient estimates remain within their nominal physical ranges. Open-loop and closed-loop performance assessments, using a physics-based simulator and full-scale autonomous Indy racecar data, highlight Deep Dynamics as a promising approach for modeling racecar vehicle dynamics.
Vehicle Dynamics Modeling for Autonomous Racing Using Gaussian Processes
Jun 06, 2023
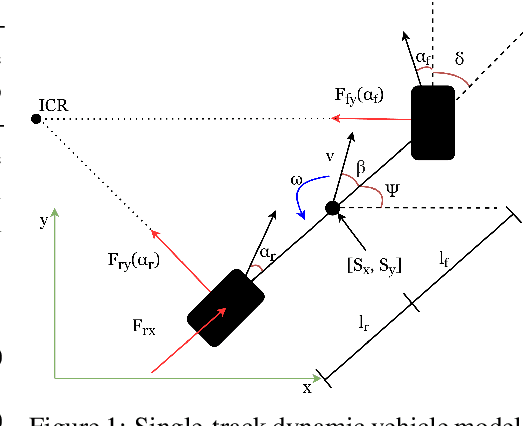

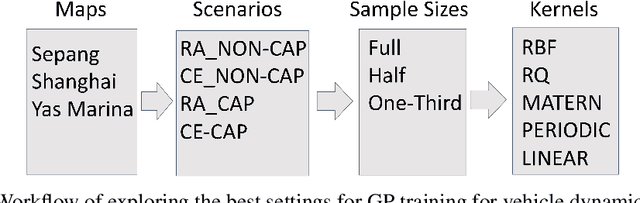
Autonomous racing is increasingly becoming a proving ground for autonomous vehicle technology at the limits of its current capabilities. The most prominent examples include the F1Tenth racing series, Formula Student Driverless (FSD), Roborace, and the Indy Autonomous Challenge (IAC). Especially necessary, in high speed autonomous racing, is the knowledge of accurate racecar vehicle dynamics. The choice of the vehicle dynamics model has to be made by balancing the increasing computational demands in contrast to improved accuracy of more complex models. Recent studies have explored learning-based methods, such as Gaussian Process (GP) regression for approximating the vehicle dynamics model. However, these efforts focus on higher level constructs such as motion planning, or predictive control and lack both in realism and rigor of the GP modeling process, which is often over-simplified. This paper presents the most detailed analysis of the applicability of GP models for approximating vehicle dynamics for autonomous racing. In particular we construct dynamic, and extended kinematic models for the popular F1TENTH racing platform. We investigate the effect of kernel choices, sample sizes, racetrack layout, racing lines, and velocity profiles on the efficacy and generalizability of the learned dynamics. We conduct 400+ simulations on real F1 track layouts to provide comprehensive recommendations to the research community for training accurate GP regression for single-track vehicle dynamics of a racecar.