 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHALO: Fault-Tolerant Safety Architecture For High-Speed Autonomous Racing
Mar 13, 2025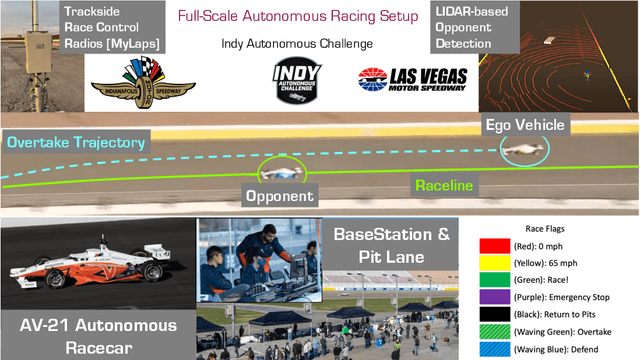

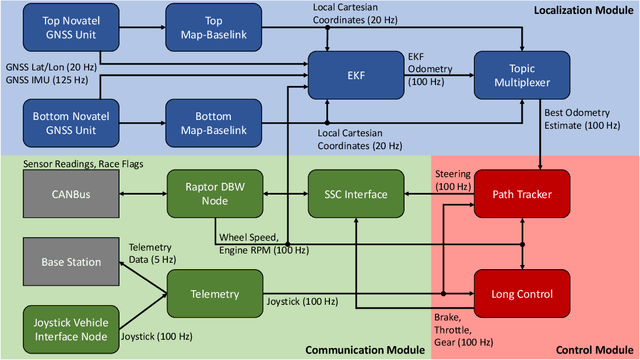
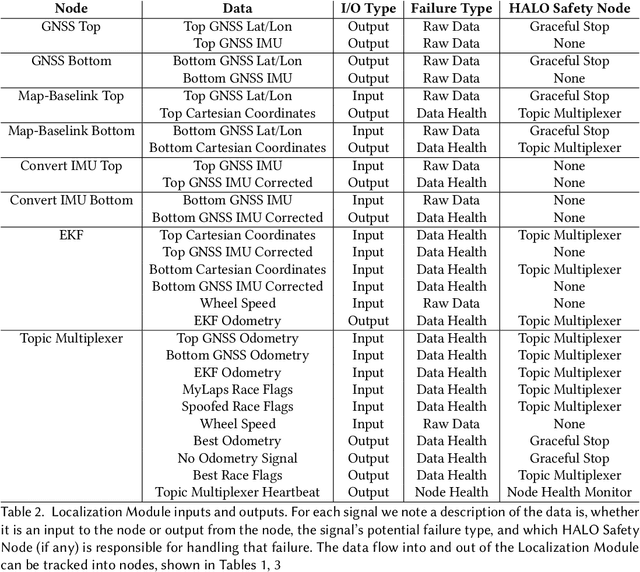
The field of high-speed autonomous racing has seen significant advances in recent years, with the rise of competitions such as RoboRace and the Indy Autonomous Challenge providing a platform for researchers to develop software stacks for autonomous race vehicles capable of reaching speeds in excess of 170 mph. Ensuring the safety of these vehicles requires the software to continuously monitor for different faults and erroneous operating conditions during high-speed operation, with the goal of mitigating any unreasonable risks posed by malfunctions in sub-systems and components. This paper presents a comprehensive overview of the HALO safety architecture, which has been implemented on a full-scale autonomous racing vehicle as part of the Indy Autonomous Challenge. The paper begins with a failure mode and criticality analysis of the perception, planning, control, and communication modules of the software stack. Specifically, we examine three different types of faults - node health, data health, and behavioral-safety faults. To mitigate these faults, the paper then outlines HALO safety archetypes and runtime monitoring methods. Finally, the paper demonstrates the effectiveness of the HALO safety architecture for each of the faults, through real-world data gathered from autonomous racing vehicle trials during multi-agent scenarios.
Trajectory-to-Action Pipeline (TAP): Automated Scenario Description Extraction for Autonomous Vehicle Behavior Comparison
Feb 27, 2025



Scenario Description Languages (SDLs) provide structured, interpretable embeddings that represent traffic scenarios encountered by autonomous vehicles (AVs), supporting key tasks such as scenario similarity searches and edge case detection for safety analysis. This paper introduces the Trajectory-to-Action Pipeline (TAP), a scalable and automated method for extracting SDL labels from large trajectory datasets. TAP applies a rules-based cross-entropy optimization approach to learn parameters directly from data, enhancing generalization across diverse driving contexts. Using the Waymo Open Motion Dataset (WOMD), TAP achieves 30% greater precision than Average Displacement Error (ADE) and 24% over Dynamic Time Warping (DTW) in identifying behaviorally similar trajectories. Additionally, TAP enables automated detection of unique driving behaviors, streamlining safety evaluation processes for AV testing. This work provides a foundation for scalable scenario-based AV behavior analysis, with potential extensions for integrating multi-agent contexts.