 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIA-TIGRIS: An Incremental and Adaptive Sampling-Based Planner for Online Informative Path Planning
Feb 21, 2025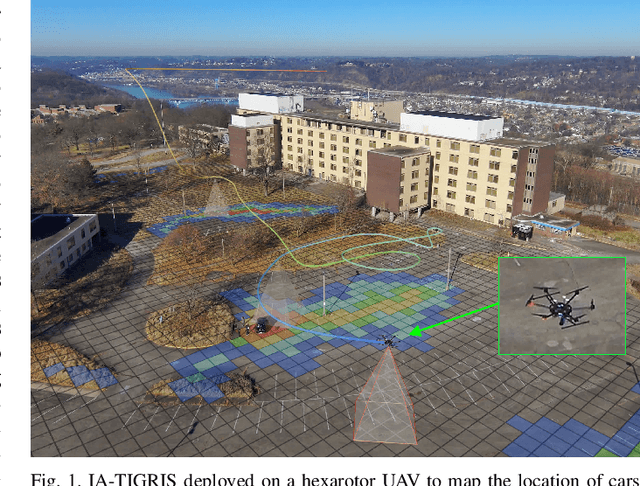
Planning paths that maximize information gain for robotic platforms has wide-ranging applications and significant potential impact. To effectively adapt to real-time data collection, informative path planning must be computed online and be responsive to new observations. In this work, we present IA-TIGRIS, an incremental and adaptive sampling-based informative path planner that can be run efficiently with onboard computation. Our approach leverages past planning efforts through incremental refinement while continuously adapting to updated world beliefs. We additionally present detailed implementation and optimization insights to facilitate real-world deployment, along with an array of reward functions tailored to specific missions and behaviors. Extensive simulation results demonstrate IA-TIGRIS generates higher-quality paths compared to baseline methods. We validate our planner on two distinct hardware platforms: a hexarotor UAV and a fixed-wing UAV, each having unique motion models and configuration spaces. Our results show up to a 41% improvement in information gain compared to baseline methods, suggesting significant potential for deployment in real-world applications.
Fast and Modular Autonomy Software for Autonomous Racing Vehicles
Aug 27, 2024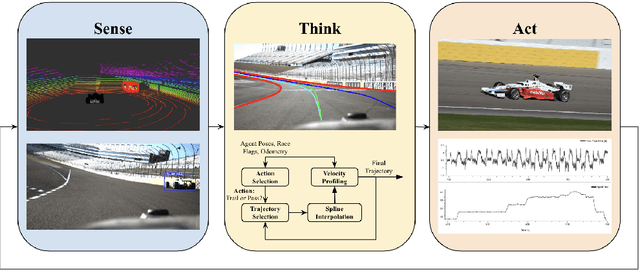

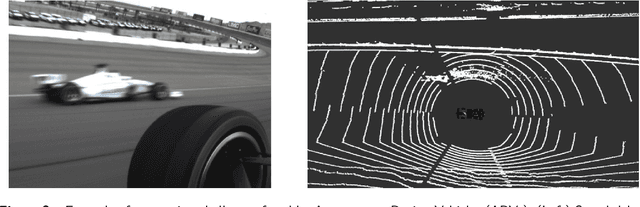

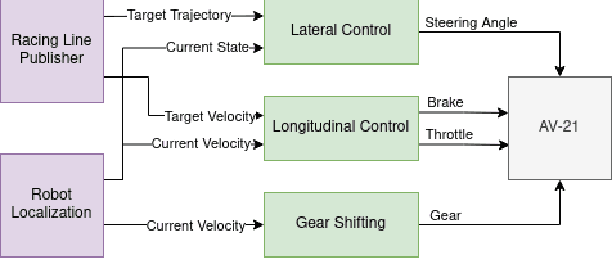
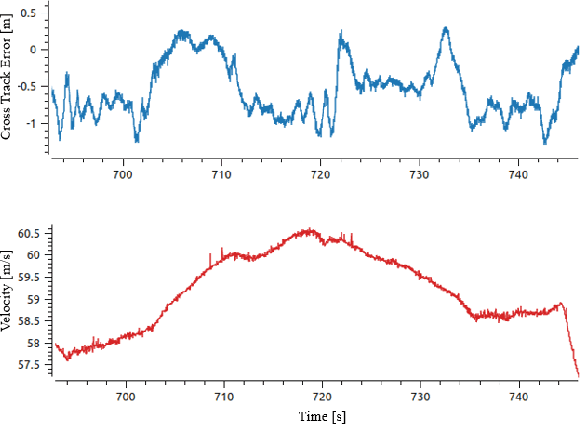
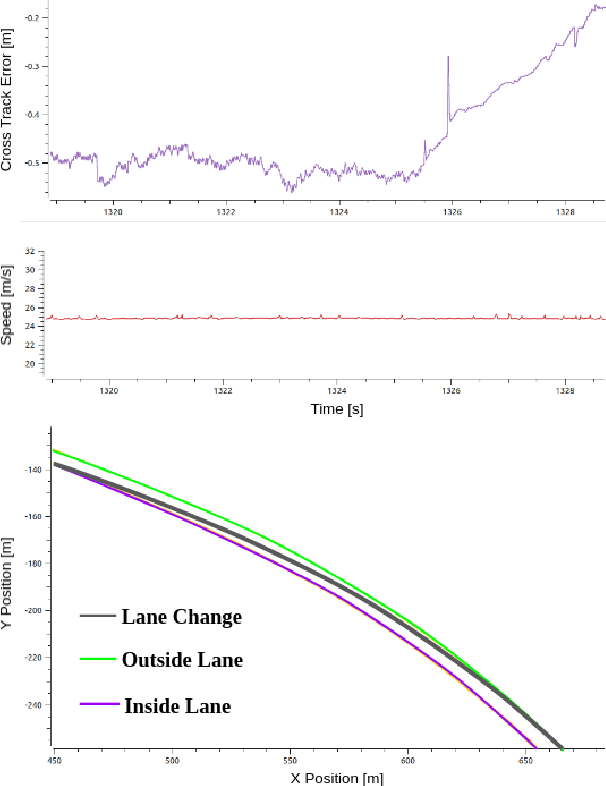
Autonomous motorsports aim to replicate the human racecar driver with software and sensors. As in traditional motorsports, Autonomous Racing Vehicles (ARVs) are pushed to their handling limits in multi-agent scenarios at extremely high ($\geq 150mph$) speeds. This Operational Design Domain (ODD) presents unique challenges across the autonomy stack. The Indy Autonomous Challenge (IAC) is an international competition aiming to advance autonomous vehicle development through ARV competitions. While far from challenging what a human racecar driver can do, the IAC is pushing the state of the art by facilitating full-sized ARV competitions. This paper details the MIT-Pitt-RW Team's approach to autonomous racing in the IAC. In this work, we present our modular and fast approach to agent detection, motion planning and controls to create an autonomy stack. We also provide analysis of the performance of the software stack in single and multi-agent scenarios for rapid deployment in a fast-paced competition environment. We also cover what did and did not work when deployed on a physical system the Dallara AV-21 platform and potential improvements to address these shortcomings. Finally, we convey lessons learned and discuss limitations and future directions for improvement.
* Published in Journal of Field Robotics
Informative Sensor Planning for a Single-Axis Gimbaled Camera on a Fixed-Wing UAV
Jul 06, 2024Uncrewed Aerial Vehicles (UAVs) are a leading choice of platforms for a variety of information-gathering applications. Sensor planning can enhance the efficiency and success of these types of missions when coupled with a higher-level informative path-planning algorithm. This paper aims to address these data acquisition challenges by developing an informative non-myopic sensor planning framework for a single-axis gimbal coupled with an informative path planner to maximize information gain over a prior information map. This is done by finding reduced sensor sweep bounds over a planning horizon such that regions of higher confidence are prioritized. This novel sensor planning framework is evaluated against a predefined sensor sweep and no sensor planning baselines as well as validated in two simulation environments. In our results, we observe an improvement in the performance by 21.88% and 13.34% for the no sensor planning and predefined sensor sweep baselines respectively.
Robust Modeling and Controls for Racing on the Edge
May 22, 2022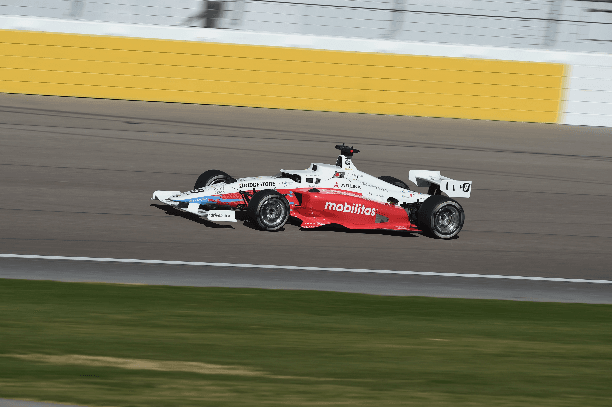
Race cars are routinely driven to the edge of their handling limits in dynamic scenarios well above 200mph. Similar challenges are posed in autonomous racing, where a software stack, instead of a human driver, interacts within a multi-agent environment. For an Autonomous Racing Vehicle (ARV), operating at the edge of handling limits and acting safely in these dynamic environments is still an unsolved problem. In this paper, we present a baseline controls stack for an ARV capable of operating safely up to 140mph. Additionally, limitations in the current approach are discussed to highlight the need for improved dynamics modeling and learning.