 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIA-TIGRIS: An Incremental and Adaptive Sampling-Based Planner for Online Informative Path Planning
Feb 21, 2025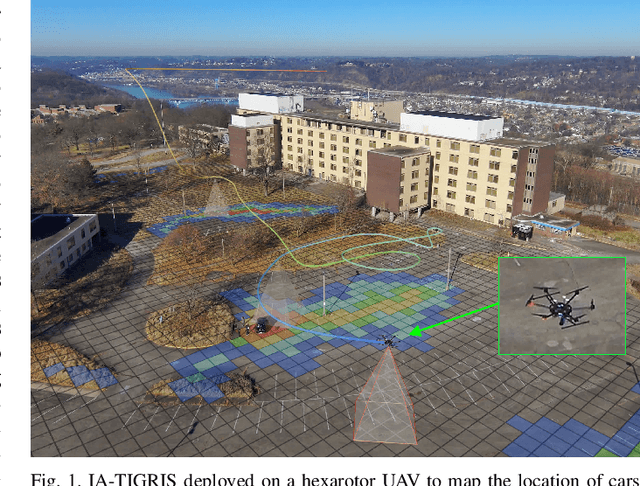
Planning paths that maximize information gain for robotic platforms has wide-ranging applications and significant potential impact. To effectively adapt to real-time data collection, informative path planning must be computed online and be responsive to new observations. In this work, we present IA-TIGRIS, an incremental and adaptive sampling-based informative path planner that can be run efficiently with onboard computation. Our approach leverages past planning efforts through incremental refinement while continuously adapting to updated world beliefs. We additionally present detailed implementation and optimization insights to facilitate real-world deployment, along with an array of reward functions tailored to specific missions and behaviors. Extensive simulation results demonstrate IA-TIGRIS generates higher-quality paths compared to baseline methods. We validate our planner on two distinct hardware platforms: a hexarotor UAV and a fixed-wing UAV, each having unique motion models and configuration spaces. Our results show up to a 41% improvement in information gain compared to baseline methods, suggesting significant potential for deployment in real-world applications.
Time-Optimal Path Planning in a Constant Wind for Uncrewed Aerial Vehicles using Dubins Set Classification
Jun 20, 2023Time-optimal path planning in high winds for a turning rate constrained UAV is a challenging problem to solve and is important for deployment and field operations. Previous works have used trochoidal path segments, which consist of straight and maximum-rate turn segments, as optimal extremal paths in uniform wind conditions. Current methods iterate over all candidate trochoidal trajectory types and choose the time-optimal one; however, this exhaustive search can be computationally slow. In this paper we present a method to decrease the computation time. We achieve this via a geometric approach to reduce the candidate trochoidal trajectory types by framing the problem in the air-relative frame and bounding the solution within a subset of candidate trajectories. This method reduces overall computation by 37.4% compared to pre-existing methods in Bang-Straight-Bang trajectories, freeing up computation for other onboard processes and can lead to significant total computational reductions when solving many trochoidal paths. When used within the framework of a global path planner, faster state expansions help find solutions faster or compute higher-quality paths. We also release our open-source codebase as a C++ package.