 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproaching Current Challenges in Developing a Software Stack for Fully Autonomous Driving
Apr 17, 2025Autonomous driving is a complex undertaking. A common approach is to break down the driving task into individual subtasks through modularization. These sub-modules are usually developed and published separately. However, if these individually developed algorithms have to be combined again to form a full-stack autonomous driving software, this poses particular challenges. Drawing upon our practical experience in developing the software of TUM Autonomous Motorsport, we have identified and derived these challenges in developing an autonomous driving software stack within a scientific environment. We do not focus on the specific challenges of individual algorithms but on the general difficulties that arise when deploying research algorithms on real-world test vehicles. To overcome these challenges, we introduce strategies that have been effective in our development approach. We additionally provide open-source implementations that enable these concepts on GitHub. As a result, this paper's contributions will simplify future full-stack autonomous driving projects, which are essential for a thorough evaluation of the individual algorithms.
Virtualization & Microservice Architecture for Software-Defined Vehicles: An Evaluation and Exploration
Dec 13, 2024



The emergence of Software-Defined Vehicles (SDVs) signifies a shift from a distributed network of electronic control units (ECUs) to a centralized computing architecture within the vehicle's electrical and electronic systems. This transition addresses the growing complexity and demand for enhanced functionality in traditional E/E architectures, with containerization and virtualization streamlining software development and updates within the SDV framework. While widely used in cloud computing, their performance and suitability for intelligent vehicles have yet to be thoroughly evaluated. In this work, we conduct a comprehensive performance evaluation of containerization and virtualization on embedded and high-performance AMD64 and ARM64 systems, focusing on CPU, memory, network, and disk metrics. In addition, we assess their impact on real-world automotive applications using the Autoware framework and further integrate a microservice-based architecture to evaluate its start-up time and resource consumption. Our extensive experiments reveal a slight 0-5% performance decline in CPU, memory, and network usage for both containerization and virtualization compared to bare-metal setups, with more significant reductions in disk operations-5-15% for containerized environments and up to 35% for virtualized setups. Despite these declines, experiments with actual vehicle applications demonstrate minimal impact on the Autoware framework, and in some cases, a microservice architecture integration improves start-up time by up to 18%.
A Containerized Microservice Architecture for a ROS 2 Autonomous Driving Software: An End-to-End Latency Evaluation
Apr 19, 2024The automotive industry is transitioning from traditional ECU-based systems to software-defined vehicles. A central role of this revolution is played by containers, lightweight virtualization technologies that enable the flexible consolidation of complex software applications on a common hardware platform. Despite their widespread adoption, the impact of containerization on fundamental real-time metrics such as end-to-end latency, communication jitter, as well as memory and CPU utilization has remained virtually unexplored. This paper presents a microservice architecture for a real-world autonomous driving application where containers isolate each service. Our comprehensive evaluation shows the benefits in terms of end-to-end latency of such a solution even over standard bare-Linux deployments. Specifically, in the case of the presented microservice architecture, the mean end-to-end latency can be improved by 5-8 %. Also, the maximum latencies were significantly reduced using container deployment.
CARLA-Autoware-Bridge: Facilitating Autonomous Driving Research with a Unified Framework for Simulation and Module Development
Feb 17, 2024Extensive testing is necessary to ensure the safety of autonomous driving modules. In addition to component tests, the safety assessment of individual modules also requires a holistic view at system level, which can be carried out efficiently with the help of simulation. Achieving seamless compatibility between a modular software stack and simulation is complex and poses a significant challenge for many researchers. To ensure testing at the system level with state-of-the-art AV software and simulation software, we have developed and analyzed a bridge connecting the CARLA simulator with the AV software Autoware Core/Universe. This publicly available bridge enables researchers to easily test their modules within the overall software. Our investigations show that an efficient and reliable communication system has been established. We provide the simulation bridge as open-source software at https://github.com/TUMFTM/Carla-Autoware-Bridge
EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023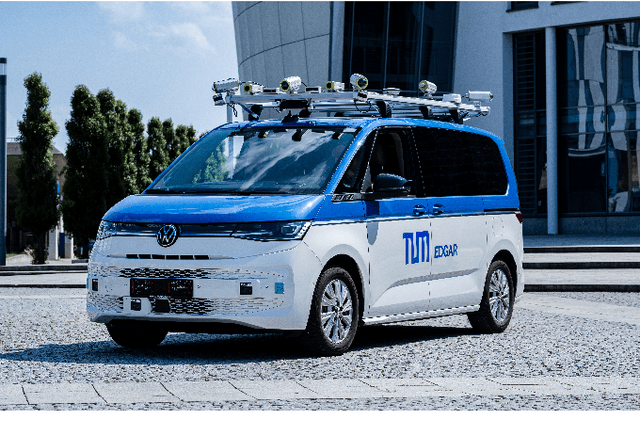
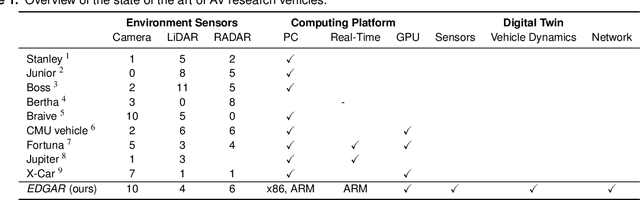

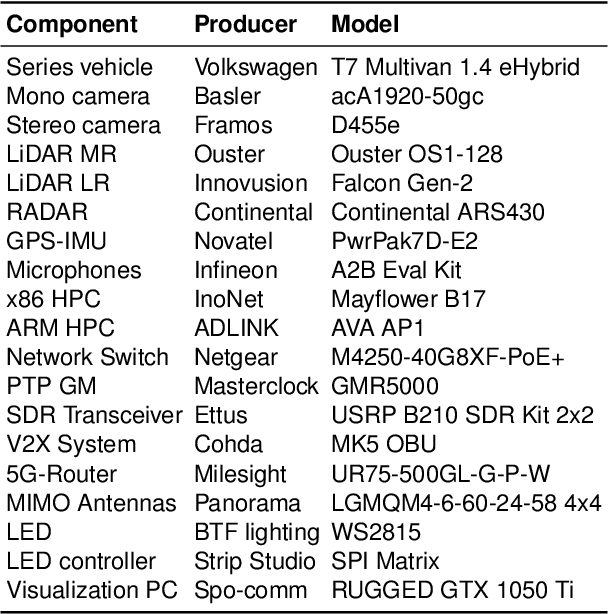
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.
TUM Autonomous Motorsport: An Autonomous Racing Software for the Indy Autonomous Challenge
May 31, 2022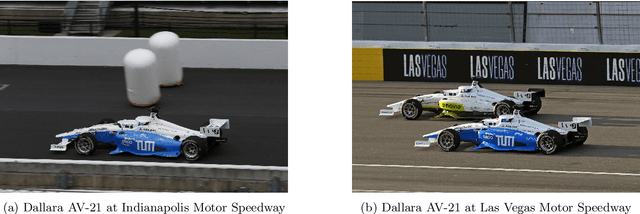
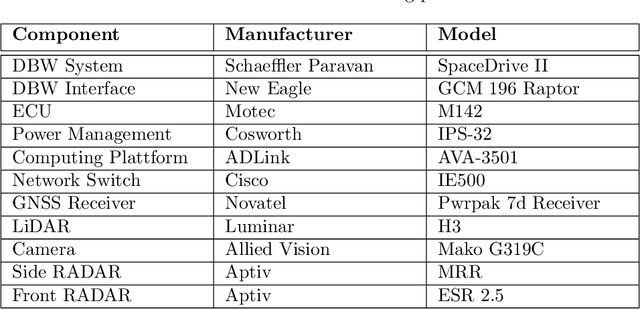
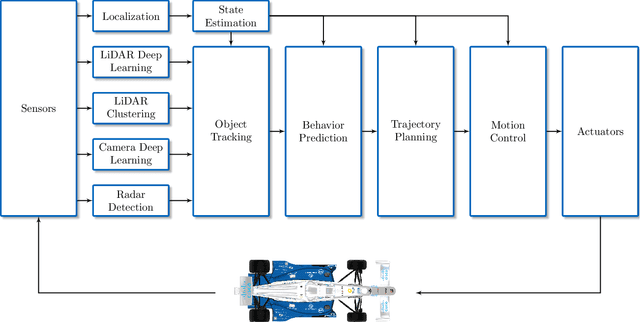
For decades, motorsport has been an incubator for innovations in the automotive sector and brought forth systems like disk brakes or rearview mirrors. Autonomous racing series such as Roborace, F1Tenth, or the Indy Autonomous Challenge (IAC) are envisioned as playing a similar role within the autonomous vehicle sector, serving as a proving ground for new technology at the limits of the autonomous systems capabilities. This paper outlines the software stack and approach of the TUM Autonomous Motorsport team for their participation in the Indy Autonomous Challenge, which holds two competitions: A single-vehicle competition on the Indianapolis Motor Speedway and a passing competition at the Las Vegas Motor Speedway. Nine university teams used an identical vehicle platform: A modified Indy Lights chassis equipped with sensors, a computing platform, and actuators. All the teams developed different algorithms for object detection, localization, planning, prediction, and control of the race cars. The team from TUM placed first in Indianapolis and secured second place in Las Vegas. During the final of the passing competition, the TUM team reached speeds and accelerations close to the limit of the vehicle, peaking at around 270 km/h and 28 ms2. This paper will present details of the vehicle hardware platform, the developed algorithms, and the workflow to test and enhance the software applied during the two-year project. We derive deep insights into the autonomous vehicle's behavior at high speed and high acceleration by providing a detailed competition analysis. Based on this, we deduce a list of lessons learned and provide insights on promising areas of future work based on the real-world evaluation of the displayed concepts.
Indy Autonomous Challenge -- Autonomous Race Cars at the Handling Limits
Feb 08, 2022
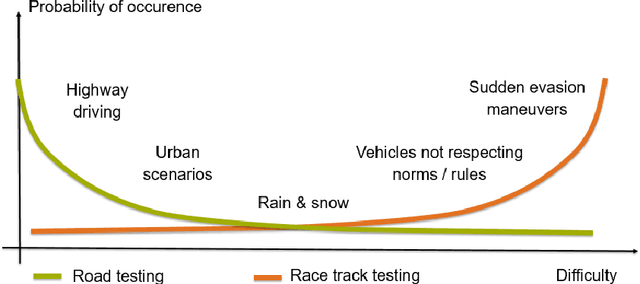

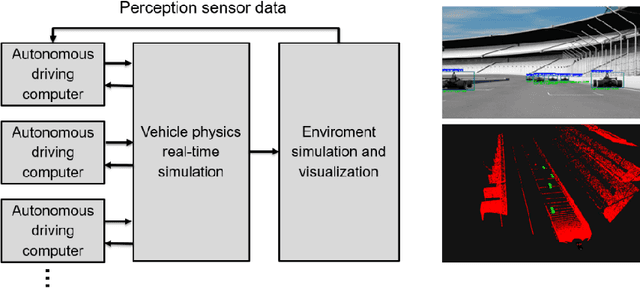
Motorsport has always been an enabler for technological advancement, and the same applies to the autonomous driving industry. The team TUM Auton-omous Motorsports will participate in the Indy Autonomous Challenge in Octo-ber 2021 to benchmark its self-driving software-stack by racing one out of ten autonomous Dallara AV-21 racecars at the Indianapolis Motor Speedway. The first part of this paper explains the reasons for entering an autonomous vehicle race from an academic perspective: It allows focusing on several edge cases en-countered by autonomous vehicles, such as challenging evasion maneuvers and unstructured scenarios. At the same time, it is inherently safe due to the motor-sport related track safety precautions. It is therefore an ideal testing ground for the development of autonomous driving algorithms capable of mastering the most challenging and rare situations. In addition, we provide insight into our soft-ware development workflow and present our Hardware-in-the-Loop simulation setup. It is capable of running simulations of up to eight autonomous vehicles in real time. The second part of the paper gives a high-level overview of the soft-ware architecture and covers our development priorities in building a high-per-formance autonomous racing software: maximum sensor detection range, relia-ble handling of multi-vehicle situations, as well as reliable motion control under uncertainty.