 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtualization & Microservice Architecture for Software-Defined Vehicles: An Evaluation and Exploration
Dec 13, 2024



The emergence of Software-Defined Vehicles (SDVs) signifies a shift from a distributed network of electronic control units (ECUs) to a centralized computing architecture within the vehicle's electrical and electronic systems. This transition addresses the growing complexity and demand for enhanced functionality in traditional E/E architectures, with containerization and virtualization streamlining software development and updates within the SDV framework. While widely used in cloud computing, their performance and suitability for intelligent vehicles have yet to be thoroughly evaluated. In this work, we conduct a comprehensive performance evaluation of containerization and virtualization on embedded and high-performance AMD64 and ARM64 systems, focusing on CPU, memory, network, and disk metrics. In addition, we assess their impact on real-world automotive applications using the Autoware framework and further integrate a microservice-based architecture to evaluate its start-up time and resource consumption. Our extensive experiments reveal a slight 0-5% performance decline in CPU, memory, and network usage for both containerization and virtualization compared to bare-metal setups, with more significant reductions in disk operations-5-15% for containerized environments and up to 35% for virtualized setups. Despite these declines, experiments with actual vehicle applications demonstrate minimal impact on the Autoware framework, and in some cases, a microservice architecture integration improves start-up time by up to 18%.
Grasp Planning for Flexible Production with Small Lot Sizes based on CAD models using GPIS and Bayesian Optimization
May 24, 2021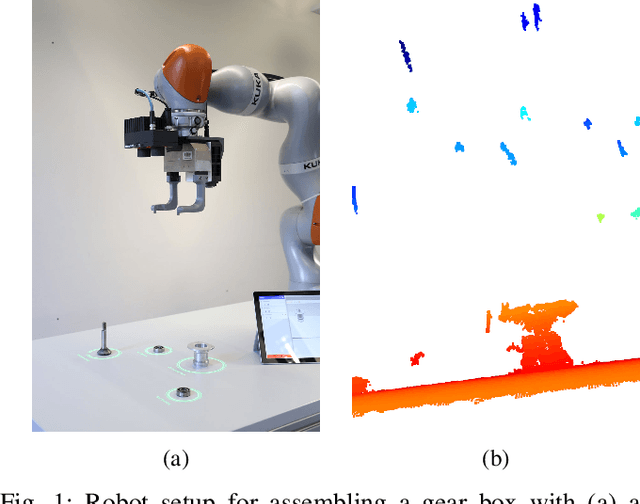


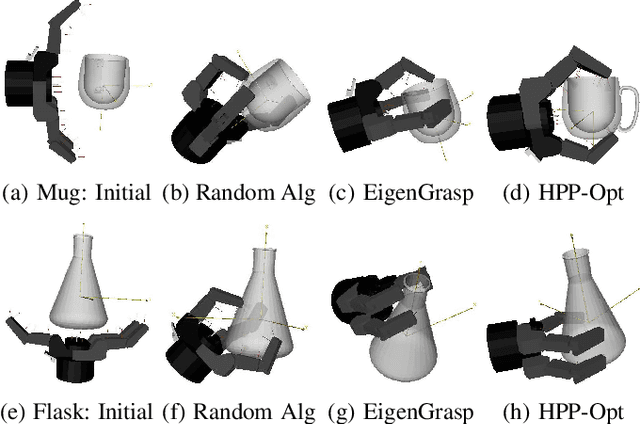
Grasp planning for multi-fingered hands is still a challenging task due to the high nonlinear quality metrics, the high dimensionality of hand posture configuration, and complex object shapes. Analytical-based grasp planning algorithms formulate the grasping problem as a constraint optimization problem using advanced convex optimization solvers. However, these are not guaranteed to find a globally optimal solution. Data-driven based algorithms utilize machine learning algorithm frameworks to learn the grasp policy using enormous training data sets. This paper presents a new approach for grasp generation by formulating a global optimization problem with Bayesian optimization. Furthermore, we parameterize the object shape utilizing the Gaussian Process Implicit Surface (GPIS) to integrate the object shape information into the optimization process. Moreover, a chart defined on the object surface is used to refine palm pose locally. We introduced a dual optimization stage to optimize the palm pose and contact points separately. We further extend the Bayesian optimization by utilizing the alternating direction method of multipliers (ADMM) to eliminate contact optimization constraints. We conduct the experiments in the graspit! Simulator that demonstrates the effectiveness of this approach quantitatively and qualitatively. Our approach achieves a 95% success rate on various commonly objects with diverse shapes, scales, and weights
Neural Networks for Safety-Critical Applications - Challenges, Experiments and Perspectives
Sep 04, 2017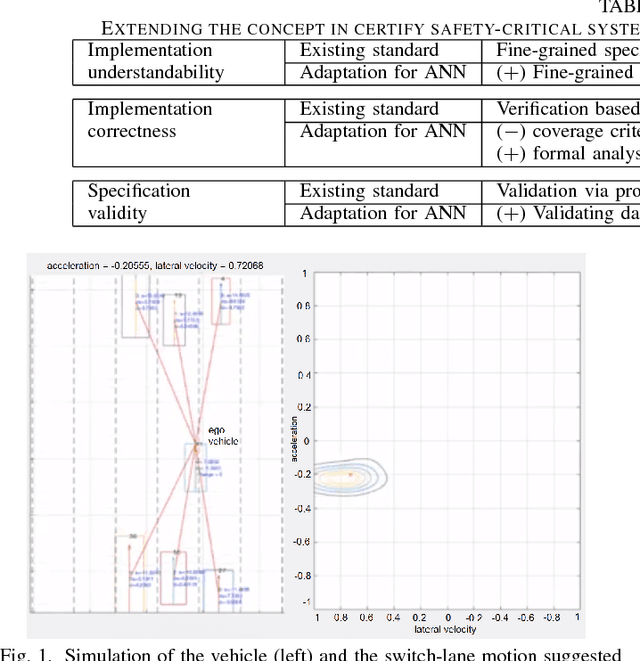
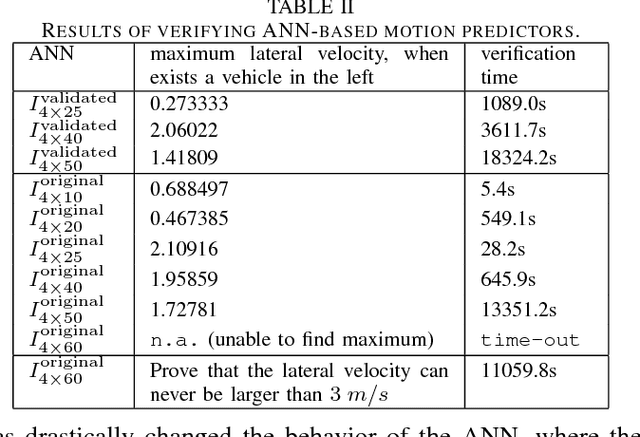
We propose a methodology for designing dependable Artificial Neural Networks (ANN) by extending the concepts of understandability, correctness, and validity that are crucial ingredients in existing certification standards. We apply the concept in a concrete case study in designing a high-way ANN-based motion predictor to guarantee safety properties such as impossibility for the ego vehicle to suggest moving to the right lane if there exists another vehicle on its right.