 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Clipper: Enhancing Safety and Reliability of Transformer-based Object Detection Models
Jun 05, 2024As transformer-based object detection models progress, their impact in critical sectors like autonomous vehicles and aviation is expected to grow. Soft errors causing bit flips during inference have significantly impacted DNN performance, altering predictions. Traditional range restriction solutions for CNNs fall short for transformers. This study introduces the Global Clipper and Global Hybrid Clipper, effective mitigation strategies specifically designed for transformer-based models. It significantly enhances their resilience to soft errors and reduces faulty inferences to ~ 0\%. We also detail extensive testing across over 64 scenarios involving two transformer models (DINO-DETR and Lite-DETR) and two CNN models (YOLOv3 and SSD) using three datasets, totalling approximately 3.3 million inferences, to assess model robustness comprehensively. Moreover, the paper explores unique aspects of attention blocks in transformers and their operational differences from CNNs.
Situation Monitor: Diversity-Driven Zero-Shot Out-of-Distribution Detection using Budding Ensemble Architecture for Object Detection
Jun 05, 2024We introduce Situation Monitor, a novel zero-shot Out-of-Distribution (OOD) detection approach for transformer-based object detection models to enhance reliability in safety-critical machine learning applications such as autonomous driving. The Situation Monitor utilizes the Diversity-based Budding Ensemble Architecture (DBEA) and increases the OOD performance by integrating a diversity loss into the training process on top of the budding ensemble architecture, detecting Far-OOD samples and minimizing false positives on Near-OOD samples. Moreover, utilizing the resulting DBEA increases the model's OOD performance and improves the calibration of confidence scores, particularly concerning the intersection over union of the detected objects. The DBEA model achieves these advancements with a 14% reduction in trainable parameters compared to the vanilla model. This signifies a substantial improvement in efficiency without compromising the model's ability to detect OOD instances and calibrate the confidence scores accurately.
BEA: Revisiting anchor-based object detection DNN using Budding Ensemble Architecture
Sep 19, 2023



This paper introduces the Budding Ensemble Architecture (BEA), a novel reduced ensemble architecture for anchor-based object detection models. Object detection models are crucial in vision-based tasks, particularly in autonomous systems. They should provide precise bounding box detections while also calibrating their predicted confidence scores, leading to higher-quality uncertainty estimates. However, current models may make erroneous decisions due to false positives receiving high scores or true positives being discarded due to low scores. BEA aims to address these issues. The proposed loss functions in BEA improve the confidence score calibration and lower the uncertainty error, which results in a better distinction of true and false positives and, eventually, higher accuracy of the object detection models. Both Base-YOLOv3 and SSD models were enhanced using the BEA method and its proposed loss functions. The BEA on Base-YOLOv3 trained on the KITTI dataset results in a 6% and 3.7% increase in mAP and AP50, respectively. Utilizing a well-balanced uncertainty estimation threshold to discard samples in real-time even leads to a 9.6% higher AP50 than its base model. This is attributed to a 40% increase in the area under the AP50-based retention curve used to measure the quality of calibration of confidence scores. Furthermore, BEA-YOLOV3 trained on KITTI provides superior out-of-distribution detection on Citypersons, BDD100K, and COCO datasets compared to the ensembles and vanilla models of YOLOv3 and Gaussian-YOLOv3.
Hardware faults that matter: Understanding and Estimating the safety impact of hardware faults on object detection DNNs
Sep 07, 2022Object detection neural network models need to perform reliably in highly dynamic and safety-critical environments like automated driving or robotics. Therefore, it is paramount to verify the robustness of the detection under unexpected hardware faults like soft errors that can impact a systems perception module. Standard metrics based on average precision produce model vulnerability estimates at the object level rather than at an image level. As we show in this paper, this does not provide an intuitive or representative indicator of the safety-related impact of silent data corruption caused by bit flips in the underlying memory but can lead to an over- or underestimation of typical fault-induced hazards. With an eye towards safety-related real-time applications, we propose a new metric IVMOD (Image-wise Vulnerability Metric for Object Detection) to quantify vulnerability based on an incorrect image-wise object detection due to false positive (FPs) or false negative (FNs) objects, combined with a severity analysis. The evaluation of several representative object detection models shows that even a single bit flip can lead to a severe silent data corruption event with potentially critical safety implications, with e.g., up to (much greater than) 100 FPs generated, or up to approx. 90% of true positives (TPs) are lost in an image. Furthermore, with a single stuck-at-1 fault, an entire sequence of images can be affected, causing temporally persistent ghost detections that can be mistaken for actual objects (covering up to approx. 83% of the image). Furthermore, actual objects in the scene are continuously missed (up to approx. 64% of TPs are lost). Our work establishes a detailed understanding of the safety-related vulnerability of such critical workloads against hardware faults.
Targetless Rotational Auto-Calibration of Radar and Camera for Intelligent Transportation Systems
Apr 18, 2019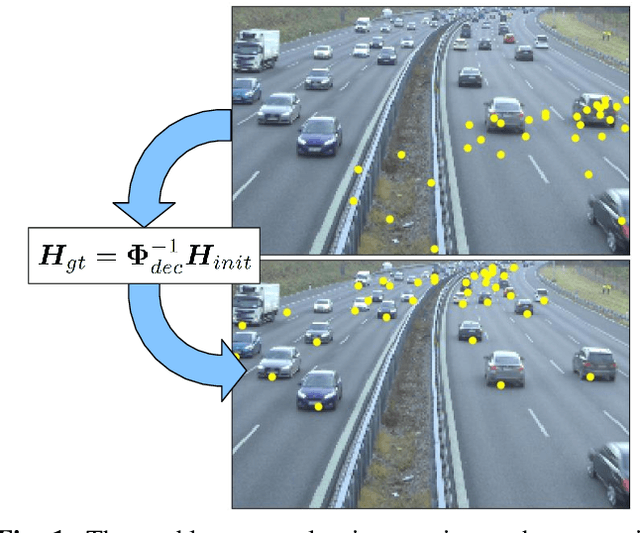
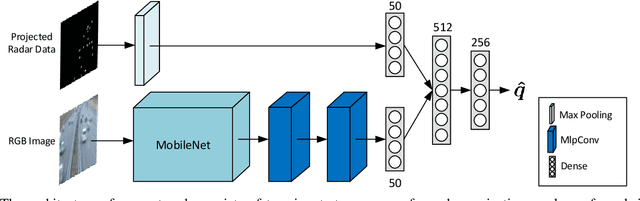
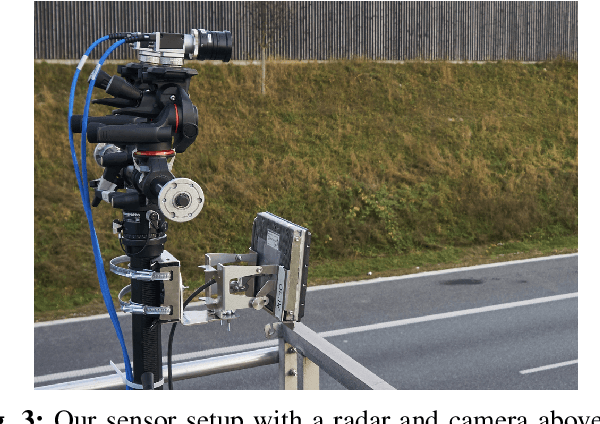
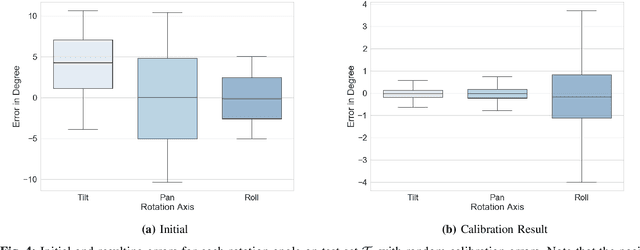
Most intelligent transportation systems use a combination of radar sensors and cameras for robust vehicle perception. The calibration of these heterogeneous sensor types in an automatic fashion during system operation is challenging due to differing physical measurement principles and the high sparsity of traffic radars. We propose - to the best of our knowledge - the first data-driven method for automatic rotational radar-camera calibration without dedicated calibration targets. Our approach is based on a coarse and a fine convolutional neural network. We employ a boosting-inspired training algorithm, where we train the fine network on the residual error of the coarse network. Due to the unavailability of public datasets combining radar and camera measurements, we recorded our own real-world data. We demonstrate that our method is able to reach precise and robust sensor registration and show its generalization capabilities to different sensor alignments and perspectives.
Deep Anticipation: Light Weight Intelligent Mobile Sensing in IoT by Recurrent Architecture
Oct 15, 2018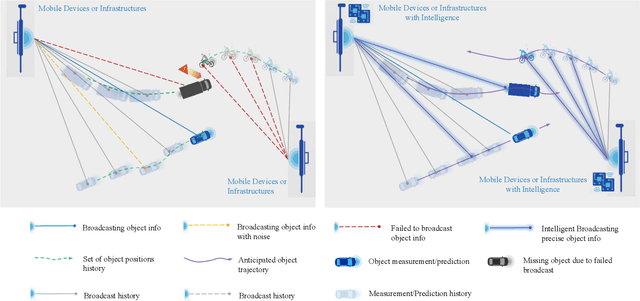


The rapid growth of IoT era is shaping the future of mobile services. Advanced communication technology enables a heterogeneous connectivity where mobile devices broadcast information to everything. Mobile applications such as robotics and vehicles connecting to cloud and surroundings transfer the short-range on-board sensor perception system to long-range mobile-sensing perception system. However, the mobile sensing perception brings new challenges for how to efficiently analyze and intelligently interpret the deluge of IoT data in mission- critical services. In this article, we model the challenges as latency, packet loss and measurement noise which severely deteriorate the reliability and quality of IoT data. We integrate the artificial intelligence into IoT to tackle these challenges. We propose a novel architecture that leverages recurrent neural networks (RNN) and Kalman filtering to anticipate motions and interac- tions between objects. The basic idea is to learn environment dynamics by recurrent networks. To improve the robustness of IoT communication, we use the idea of Kalman filtering and deploy a prediction and correction step. In this way, the architecture learns to develop a biased belief between prediction and measurement in the different situation. We demonstrate our approach with synthetic and real-world datasets with noise that mimics the challenges of IoT communications. Our method brings a new level of IoT intelligence. It is also lightweight compared to other state-of-the-art convolutional recurrent architecture and is ideally suitable for the resource-limited mobile applications.
Neural Networks for Safety-Critical Applications - Challenges, Experiments and Perspectives
Sep 04, 2017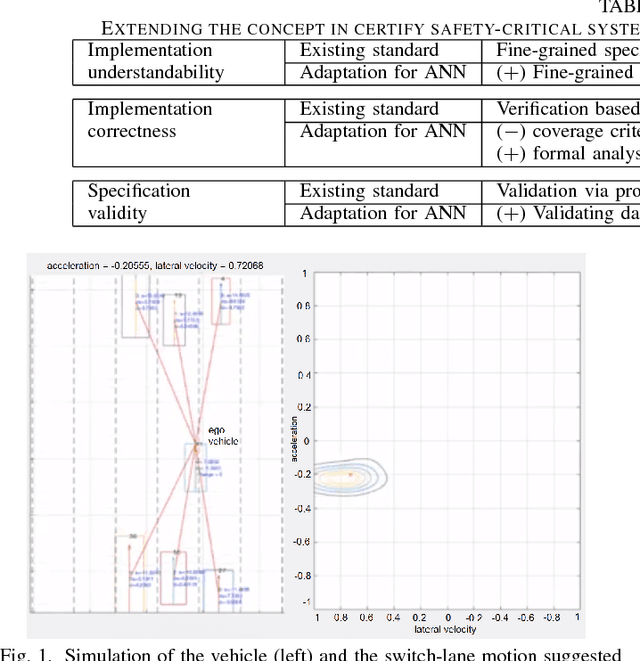
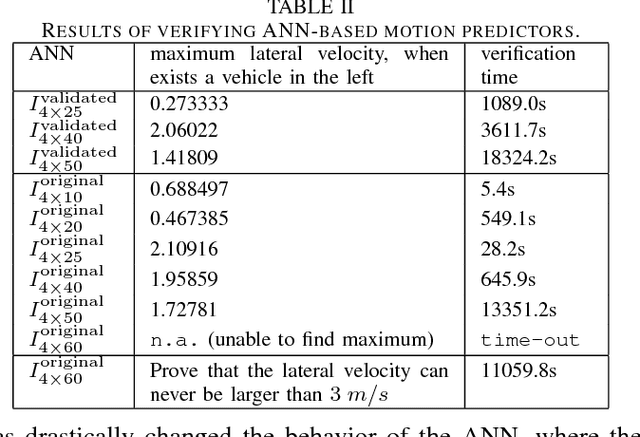
We propose a methodology for designing dependable Artificial Neural Networks (ANN) by extending the concepts of understandability, correctness, and validity that are crucial ingredients in existing certification standards. We apply the concept in a concrete case study in designing a high-way ANN-based motion predictor to guarantee safety properties such as impossibility for the ego vehicle to suggest moving to the right lane if there exists another vehicle on its right.