 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Automated Safety Requirements Derivation Using Agent-based RAG
Apr 15, 2025We study the automated derivation of safety requirements in a self-driving vehicle use case, leveraging LLMs in combination with agent-based retrieval-augmented generation. Conventional approaches that utilise pre-trained LLMs to assist in safety analyses typically lack domain-specific knowledge. Existing RAG approaches address this issue, yet their performance deteriorates when handling complex queries and it becomes increasingly harder to retrieve the most relevant information. This is particularly relevant for safety-relevant applications. In this paper, we propose the use of agent-based RAG to derive safety requirements and show that the retrieved information is more relevant to the queries. We implement an agent-based approach on a document pool of automotive standards and the Apollo case study, as a representative example of an automated driving perception system. Our solution is tested on a data set of safety requirement questions and answers, extracted from the Apollo data. Evaluating a set of selected RAG metrics, we present and discuss advantages of a agent-based approach compared to default RAG methods.
* 9 pages, 3 figures
A Low-cost Strategic Monitoring Approach for Scalable and Interpretable Error Detection in Deep Neural Networks
Oct 31, 2023We present a highly compact run-time monitoring approach for deep computer vision networks that extracts selected knowledge from only a few (down to merely two) hidden layers, yet can efficiently detect silent data corruption originating from both hardware memory and input faults. Building on the insight that critical faults typically manifest as peak or bulk shifts in the activation distribution of the affected network layers, we use strategically placed quantile markers to make accurate estimates about the anomaly of the current inference as a whole. Importantly, the detector component itself is kept algorithmically transparent to render the categorization of regular and abnormal behavior interpretable to a human. Our technique achieves up to ~96% precision and ~98% recall of detection. Compared to state-of-the-art anomaly detection techniques, this approach requires minimal compute overhead (as little as 0.3% with respect to non-supervised inference time) and contributes to the explainability of the model.
Large-Scale Application of Fault Injection into PyTorch Models -- an Extension to PyTorchFI for Validation Efficiency
Oct 30, 2023Transient or permanent faults in hardware can render the output of Neural Networks (NN) incorrect without user-specific traces of the error, i.e. silent data errors (SDE). On the other hand, modern NNs also possess an inherent redundancy that can tolerate specific faults. To establish a safety case, it is necessary to distinguish and quantify both types of corruptions. To study the effects of hardware (HW) faults on software (SW) in general and NN models in particular, several fault injection (FI) methods have been established in recent years. Current FI methods focus on the methodology of injecting faults but often fall short of accounting for large-scale FI tests, where many fault locations based on a particular fault model need to be analyzed in a short time. Results need to be concise, repeatable, and comparable. To address these requirements and enable fault injection as the default component in a machine learning development cycle, we introduce a novel fault injection framework called PyTorchALFI (Application Level Fault Injection for PyTorch) based on PyTorchFI. PyTorchALFI provides an efficient way to define randomly generated and reusable sets of faults to inject into PyTorch models, defines complex test scenarios, enhances data sets, and generates test KPIs while tightly coupling fault-free, faulty, and modified NN. In this paper, we provide details about the definition of test scenarios, software architecture, and several examples of how to use the new framework to apply iterative changes in fault location and number, compare different model modifications, and analyze test results.
BEA: Revisiting anchor-based object detection DNN using Budding Ensemble Architecture
Sep 19, 2023



This paper introduces the Budding Ensemble Architecture (BEA), a novel reduced ensemble architecture for anchor-based object detection models. Object detection models are crucial in vision-based tasks, particularly in autonomous systems. They should provide precise bounding box detections while also calibrating their predicted confidence scores, leading to higher-quality uncertainty estimates. However, current models may make erroneous decisions due to false positives receiving high scores or true positives being discarded due to low scores. BEA aims to address these issues. The proposed loss functions in BEA improve the confidence score calibration and lower the uncertainty error, which results in a better distinction of true and false positives and, eventually, higher accuracy of the object detection models. Both Base-YOLOv3 and SSD models were enhanced using the BEA method and its proposed loss functions. The BEA on Base-YOLOv3 trained on the KITTI dataset results in a 6% and 3.7% increase in mAP and AP50, respectively. Utilizing a well-balanced uncertainty estimation threshold to discard samples in real-time even leads to a 9.6% higher AP50 than its base model. This is attributed to a 40% increase in the area under the AP50-based retention curve used to measure the quality of calibration of confidence scores. Furthermore, BEA-YOLOV3 trained on KITTI provides superior out-of-distribution detection on Citypersons, BDD100K, and COCO datasets compared to the ensembles and vanilla models of YOLOv3 and Gaussian-YOLOv3.
Hardware faults that matter: Understanding and Estimating the safety impact of hardware faults on object detection DNNs
Sep 07, 2022Object detection neural network models need to perform reliably in highly dynamic and safety-critical environments like automated driving or robotics. Therefore, it is paramount to verify the robustness of the detection under unexpected hardware faults like soft errors that can impact a systems perception module. Standard metrics based on average precision produce model vulnerability estimates at the object level rather than at an image level. As we show in this paper, this does not provide an intuitive or representative indicator of the safety-related impact of silent data corruption caused by bit flips in the underlying memory but can lead to an over- or underestimation of typical fault-induced hazards. With an eye towards safety-related real-time applications, we propose a new metric IVMOD (Image-wise Vulnerability Metric for Object Detection) to quantify vulnerability based on an incorrect image-wise object detection due to false positive (FPs) or false negative (FNs) objects, combined with a severity analysis. The evaluation of several representative object detection models shows that even a single bit flip can lead to a severe silent data corruption event with potentially critical safety implications, with e.g., up to (much greater than) 100 FPs generated, or up to approx. 90% of true positives (TPs) are lost in an image. Furthermore, with a single stuck-at-1 fault, an entire sequence of images can be affected, causing temporally persistent ghost detections that can be mistaken for actual objects (covering up to approx. 83% of the image). Furthermore, actual objects in the scene are continuously missed (up to approx. 64% of TPs are lost). Our work establishes a detailed understanding of the safety-related vulnerability of such critical workloads against hardware faults.
Cooperative RADAR Sensors for the Digital Test Field A9 (KoRA9): Algorithmic Recap and Lessons Learned
Jan 04, 2022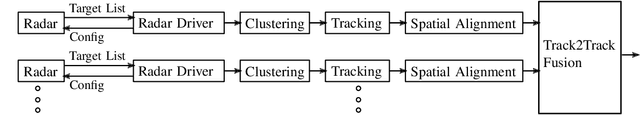



Infrastructure sensing systems in combination with Infrastructure-to-Vehicle communication can be used to enhance sensor data obtained from the perspective of a vehicle, only. This paper presents a system consisting of a radar sensor network installed at the side of the street, together with an Edge Processing Unit to fuse the data of different sensors. Measurements taken by the demonstrator are shown, the system architecture is discussed, and some lessons learned are presented.
Fault-Tolerant Perception for Automated Driving A Lightweight Monitoring Approach
Nov 24, 2021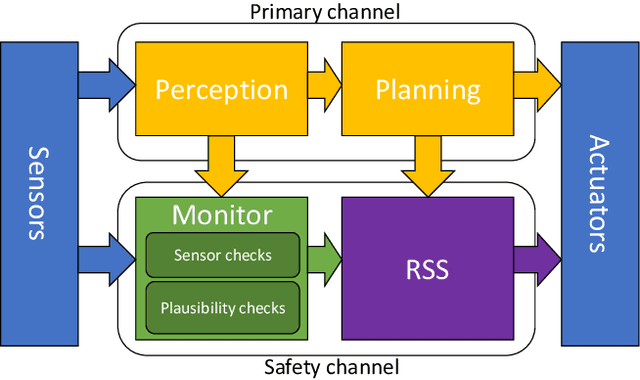
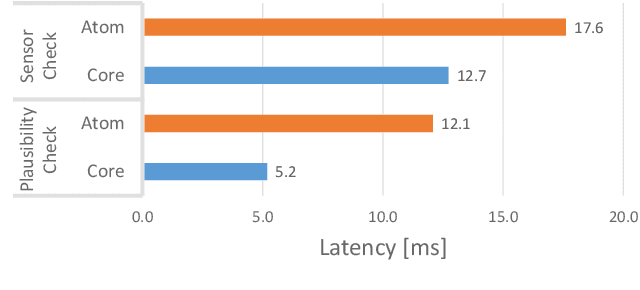
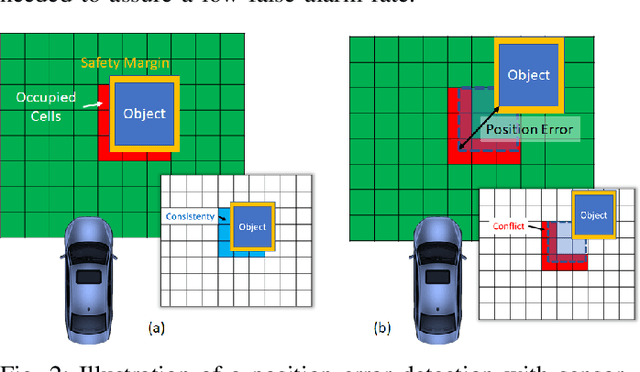

While the most visible part of the safety verification process of automated vehicles concerns the planning and control system, it is often overlooked that safety of the latter crucially depends on the fault-tolerance of the preceding environment perception. Modern perception systems feature complex and often machine-learning-based components with various failure modes that can jeopardize the overall safety. At the same time, a verification by for example redundant execution is not always feasible due to resource constraints. In this paper, we address the need for feasible and efficient perception monitors and propose a lightweight approach that helps to protect the integrity of the perception system while keeping the additional compute overhead minimal. In contrast to existing solutions, the monitor is realized by a well-balanced combination of sensor checks -- here using LiDAR information -- and plausibility checks on the object motion history. It is designed to detect relevant errors in the distance and velocity of objects in the environment of the automated vehicle. In conjunction with an appropriate planning system, such a monitor can help to make safe automated driving feasible.
Towards a Safety Case for Hardware Fault Tolerance in Convolutional Neural Networks Using Activation Range Supervision
Aug 16, 2021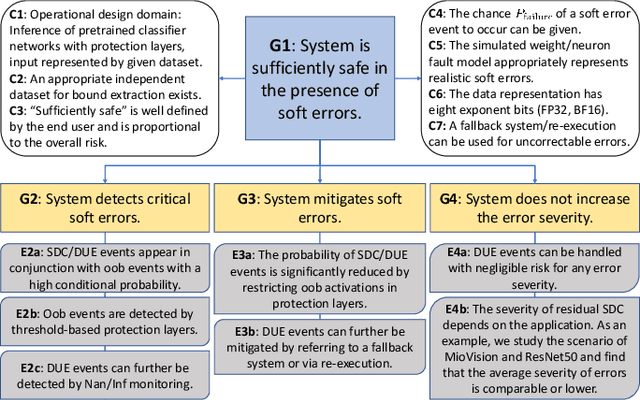
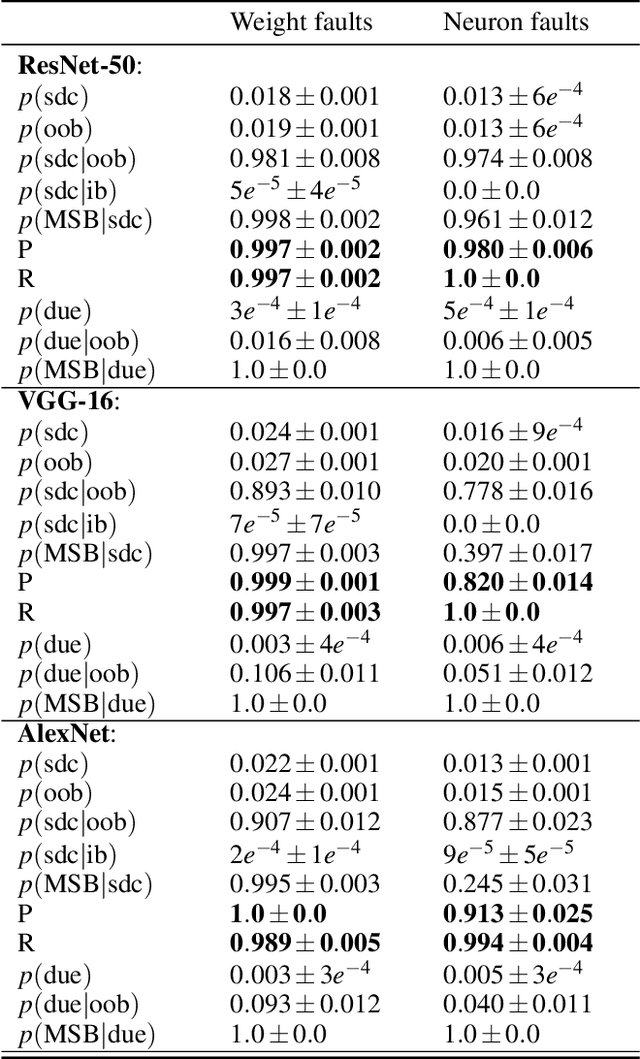
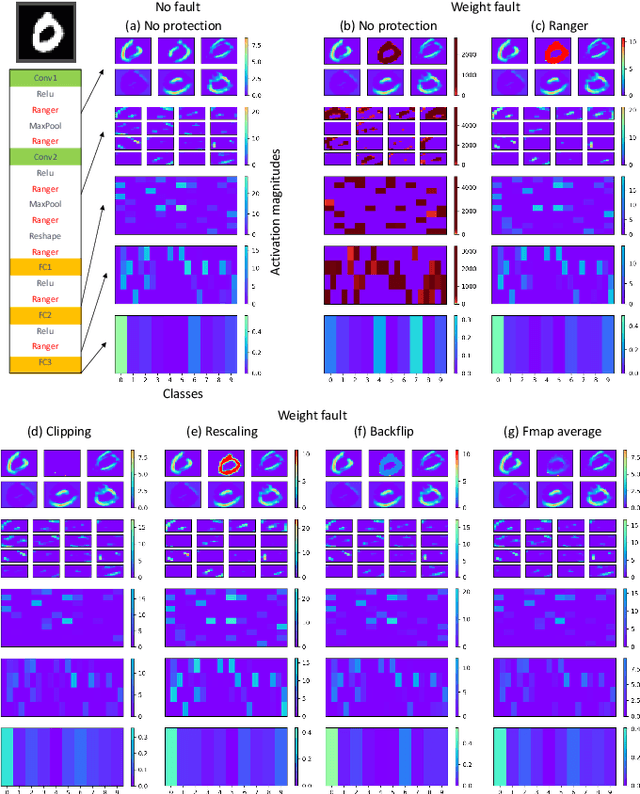
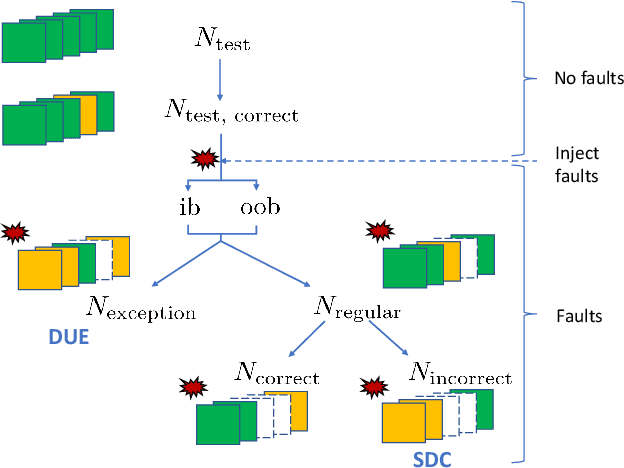
Convolutional neural networks (CNNs) have become an established part of numerous safety-critical computer vision applications, including human robot interactions and automated driving. Real-world implementations will need to guarantee their robustness against hardware soft errors corrupting the underlying platform memory. Based on the previously observed efficacy of activation clipping techniques, we build a prototypical safety case for classifier CNNs by demonstrating that range supervision represents a highly reliable fault detector and mitigator with respect to relevant bit flips, adopting an eight-exponent floating point data representation. We further explore novel, non-uniform range restriction methods that effectively suppress the probability of silent data corruptions and uncorrectable errors. As a safety-relevant end-to-end use case, we showcase the benefit of our approach in a vehicle classification scenario, using ResNet-50 and the traffic camera data set MIOVision. The quantitative evidence provided in this work can be leveraged to inspire further and possibly more complex CNN safety arguments.
A Roadmap Towards Resilient Internet of Things for Cyber-Physical Systems
Nov 06, 2018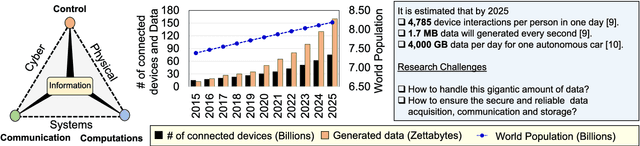
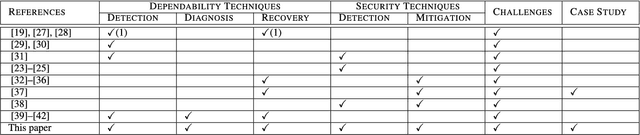
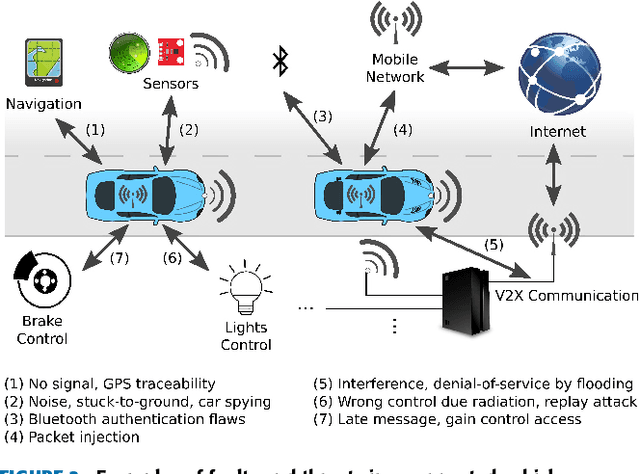

The Internet of Things (IoT) is a ubiquitous system connecting many different devices - the things - which can be accessed from the distance. The cyber-physical systems (CPS) monitor and control the things from the distance. As a result, the concepts of dependability and security get deeply intertwined. The increasing level of dynamicity, heterogeneity, and complexity adds to the system's vulnerability, and challenges its ability to react to faults. This paper summarizes state-of-the-art of existing work on anomaly detection, fault-tolerance and self-healing, and adds a number of other methods applicable to achieve resilience in an IoT. We particularly focus on non-intrusive methods ensuring data integrity in the network. Furthermore, this paper presents the main challenges in building a resilient IoT for CPS which is crucial in the era of smart CPS with enhanced connectivity (an excellent example of such a system is connected autonomous vehicles). It further summarizes our solutions, work-in-progress and future work to this topic to enable "Trustworthy IoT for CPS". Finally, this framework is illustrated on a selected use case: A smart sensor infrastructure in the transport domain.