 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Low-cost Strategic Monitoring Approach for Scalable and Interpretable Error Detection in Deep Neural Networks
Oct 31, 2023We present a highly compact run-time monitoring approach for deep computer vision networks that extracts selected knowledge from only a few (down to merely two) hidden layers, yet can efficiently detect silent data corruption originating from both hardware memory and input faults. Building on the insight that critical faults typically manifest as peak or bulk shifts in the activation distribution of the affected network layers, we use strategically placed quantile markers to make accurate estimates about the anomaly of the current inference as a whole. Importantly, the detector component itself is kept algorithmically transparent to render the categorization of regular and abnormal behavior interpretable to a human. Our technique achieves up to ~96% precision and ~98% recall of detection. Compared to state-of-the-art anomaly detection techniques, this approach requires minimal compute overhead (as little as 0.3% with respect to non-supervised inference time) and contributes to the explainability of the model.
Hardware faults that matter: Understanding and Estimating the safety impact of hardware faults on object detection DNNs
Sep 07, 2022Object detection neural network models need to perform reliably in highly dynamic and safety-critical environments like automated driving or robotics. Therefore, it is paramount to verify the robustness of the detection under unexpected hardware faults like soft errors that can impact a systems perception module. Standard metrics based on average precision produce model vulnerability estimates at the object level rather than at an image level. As we show in this paper, this does not provide an intuitive or representative indicator of the safety-related impact of silent data corruption caused by bit flips in the underlying memory but can lead to an over- or underestimation of typical fault-induced hazards. With an eye towards safety-related real-time applications, we propose a new metric IVMOD (Image-wise Vulnerability Metric for Object Detection) to quantify vulnerability based on an incorrect image-wise object detection due to false positive (FPs) or false negative (FNs) objects, combined with a severity analysis. The evaluation of several representative object detection models shows that even a single bit flip can lead to a severe silent data corruption event with potentially critical safety implications, with e.g., up to (much greater than) 100 FPs generated, or up to approx. 90% of true positives (TPs) are lost in an image. Furthermore, with a single stuck-at-1 fault, an entire sequence of images can be affected, causing temporally persistent ghost detections that can be mistaken for actual objects (covering up to approx. 83% of the image). Furthermore, actual objects in the scene are continuously missed (up to approx. 64% of TPs are lost). Our work establishes a detailed understanding of the safety-related vulnerability of such critical workloads against hardware faults.
Towards a Safety Case for Hardware Fault Tolerance in Convolutional Neural Networks Using Activation Range Supervision
Aug 16, 2021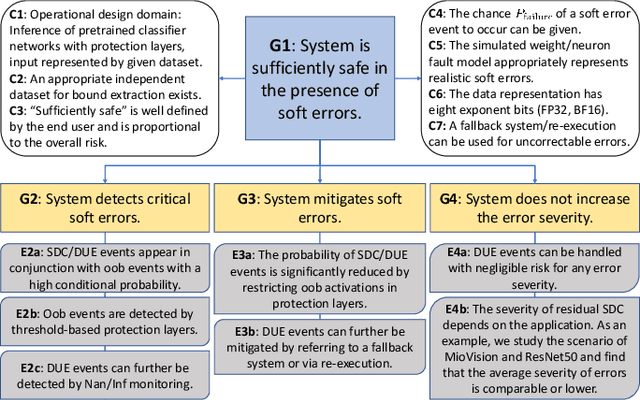
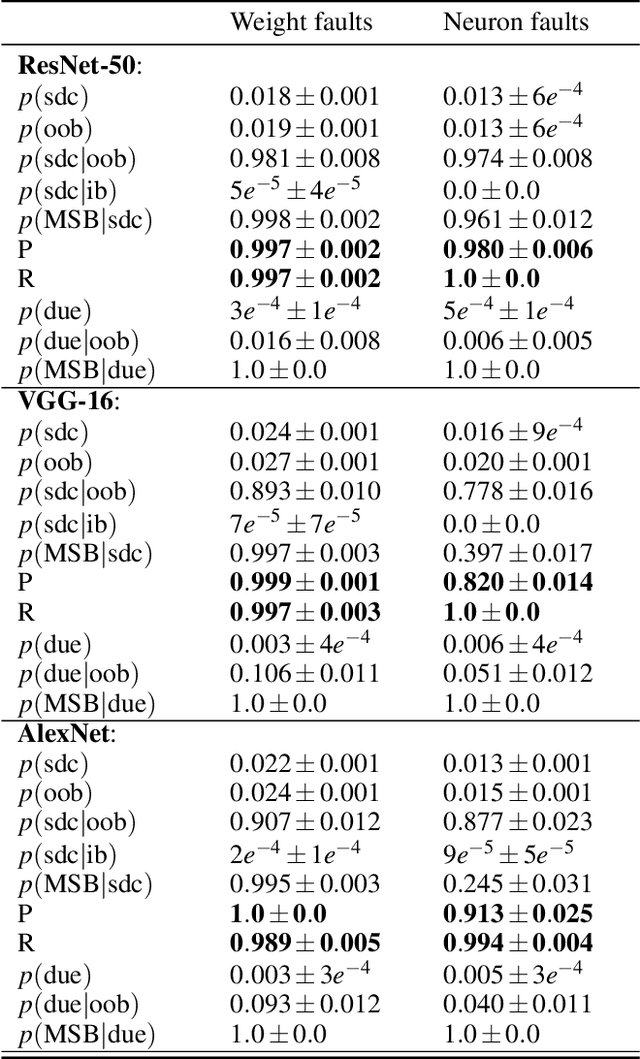
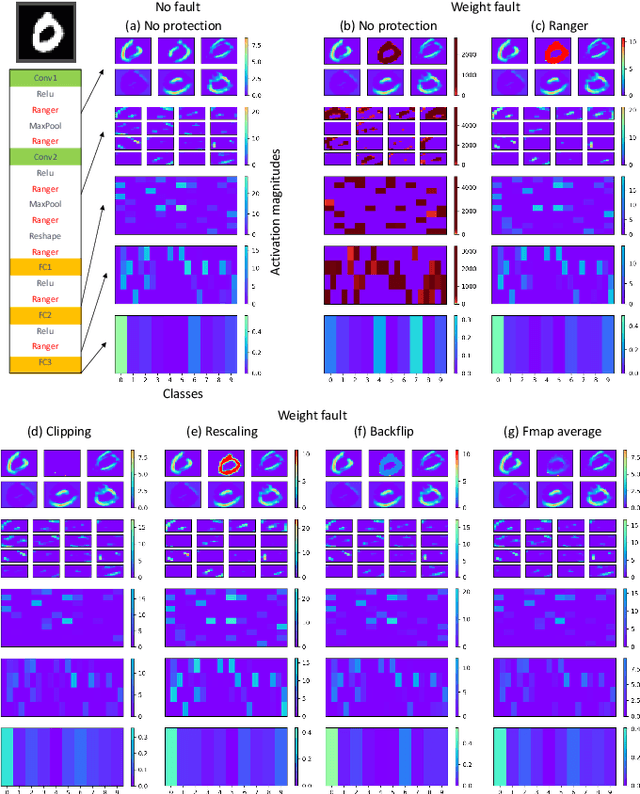
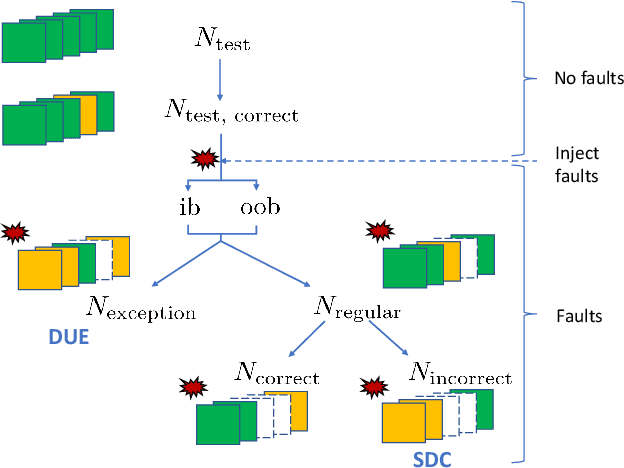
Convolutional neural networks (CNNs) have become an established part of numerous safety-critical computer vision applications, including human robot interactions and automated driving. Real-world implementations will need to guarantee their robustness against hardware soft errors corrupting the underlying platform memory. Based on the previously observed efficacy of activation clipping techniques, we build a prototypical safety case for classifier CNNs by demonstrating that range supervision represents a highly reliable fault detector and mitigator with respect to relevant bit flips, adopting an eight-exponent floating point data representation. We further explore novel, non-uniform range restriction methods that effectively suppress the probability of silent data corruptions and uncorrectable errors. As a safety-relevant end-to-end use case, we showcase the benefit of our approach in a vehicle classification scenario, using ResNet-50 and the traffic camera data set MIOVision. The quantitative evidence provided in this work can be leveraged to inspire further and possibly more complex CNN safety arguments.