 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Fine-Tuning of Pretrained Controllers for Autonomous Driving via Real-Time Recurrent RL
Feb 03, 2026Deploying pretrained policies in real-world applications presents substantial challenges that fundamentally limit the practical applicability of learning-based control systems. When autonomous systems encounter environmental changes in system dynamics, sensor drift, or task objectives, fixed policies rapidly degrade in performance. We show that employing Real-Time Recurrent Reinforcement Learning (RTRRL), a biologically plausible algorithm for online adaptation, can effectively fine-tune a pretrained policy to improve autonomous agents' performance on driving tasks. We further show that RTRRL synergizes with a recent biologically inspired recurrent network model, the Liquid-Resistance Liquid-Capacitance RNN. We demonstrate the effectiveness of this closed-loop approach in a simulated CarRacing environment and in a real-world line-following task with a RoboRacer car equipped with an event camera.
Online Fine-Tuning of Carbon Emission Predictions using Real-Time Recurrent Learning for State Space Models
Aug 01, 2025This paper introduces a new approach for fine-tuning the predictions of structured state space models (SSMs) at inference time using real-time recurrent learning. While SSMs are known for their efficiency and long-range modeling capabilities, they are typically trained offline and remain static during deployment. Our method enables online adaptation by continuously updating model parameters in response to incoming data. We evaluate our approach for linear-recurrent-unit SSMs using a small carbon emission dataset collected from embedded automotive hardware. Experimental results show that our method consistently reduces prediction error online during inference, demonstrating its potential for dynamic, resource-constrained environments.
Visual Graph Arena: Evaluating Visual Conceptualization of Vision and Multimodal Large Language Models
Jun 06, 2025Recent advancements in multimodal large language models have driven breakthroughs in visual question answering. Yet, a critical gap persists, `conceptualization'-the ability to recognize and reason about the same concept despite variations in visual form, a basic ability of human reasoning. To address this challenge, we introduce the Visual Graph Arena (VGA), a dataset featuring six graph-based tasks designed to evaluate and improve AI systems' capacity for visual abstraction. VGA uses diverse graph layouts (e.g., Kamada-Kawai vs. planar) to test reasoning independent of visual form. Experiments with state-of-the-art vision models and multimodal LLMs reveal a striking divide: humans achieved near-perfect accuracy across tasks, while models totally failed on isomorphism detection and showed limited success in path/cycle tasks. We further identify behavioral anomalies suggesting pseudo-intelligent pattern matching rather than genuine understanding. These findings underscore fundamental limitations in current AI models for visual understanding. By isolating the challenge of representation-invariant reasoning, the VGA provides a framework to drive progress toward human-like conceptualization in AI visual models. The Visual Graph Arena is available at: \href{https://vga.csail.mit.edu/}{vga.csail.mit.edu}
Differential Gated Self-Attention
May 29, 2025Transformers excel across a large variety of tasks but remain susceptible to corrupted inputs, since standard self-attention treats all query-key interactions uniformly. Inspired by lateral inhibition in biological neural circuits and building on the recent use by the Differential Transformer's use of two parallel softmax subtraction for noise cancellation, we propose Multihead Differential Gated Self-Attention (M-DGSA) that learns per-head input-dependent gating to dynamically suppress attention noise. Each head splits into excitatory and inhibitory branches whose dual softmax maps are fused by a sigmoid gate predicted from the token embedding, yielding a context-aware contrast enhancement. M-DGSA integrates seamlessly into existing Transformer stacks with minimal computational overhead. We evaluate on both vision and language benchmarks, demonstrating consistent robustness gains over vanilla Transformer, Vision Transformer, and Differential Transformer baselines. Our contributions are (i) a novel input-dependent gating mechanism for self-attention grounded in lateral inhibition, (ii) a principled synthesis of biological contrast-enhancement and self-attention theory, and (iii) comprehensive experiments demonstrating noise resilience and cross-domain applicability.
Scaling Up Liquid-Resistance Liquid-Capacitance Networks for Efficient Sequence Modeling
May 29, 2025We present LrcSSM, a $\textit{nonlinear}$ recurrent model that processes long sequences as fast as today's linear state-space layers. By forcing the state-transition matrix to be diagonal and learned at every step, the full sequence can be solved in parallel with a single prefix-scan, giving $\mathcal{O}(TD)$ time and memory and only $\mathcal{O}(\log T)$ sequential depth, for input-sequence length $T$ and a state dimension $D$. Moreover, LrcSSM offers a formal gradient-stability guarantee that other input-varying systems such as Liquid-S4 and Mamba do not provide. Lastly, for network depth $L$, as the forward and backward passes cost $\Theta(T\,D\,L)$ FLOPs, with its low sequential depth and parameter count $\Theta(D\,L)$, the model follows the compute-optimal scaling law regime ($\beta \approx 0.42$) recently observed for Mamba, outperforming quadratic-attention Transformers at equal compute while avoiding the memory overhead of FFT-based long convolutions. We show that on a series of long-range forecasting tasks, LrcSSM outperforms LRU, S5 and Mamba.
Depth Matters: Multimodal RGB-D Perception for Robust Autonomous Agents
Mar 20, 2025



Autonomous agents that rely purely on perception to make real-time control decisions require efficient and robust architectures. In this work, we demonstrate that augmenting RGB input with depth information significantly enhances our agents' ability to predict steering commands compared to using RGB alone. We benchmark lightweight recurrent controllers that leverage the fused RGB-D features for sequential decision-making. To train our models, we collect high-quality data using a small-scale autonomous car controlled by an expert driver via a physical steering wheel, capturing varying levels of steering difficulty. Our models, trained under diverse configurations, were successfully deployed on real hardware. Specifically, our findings reveal that the early fusion of depth data results in a highly robust controller, which remains effective even with frame drops and increased noise levels, without compromising the network's focus on the task.
The Master Key Filters Hypothesis: Deep Filters Are General in DS-CNNs
Dec 21, 2024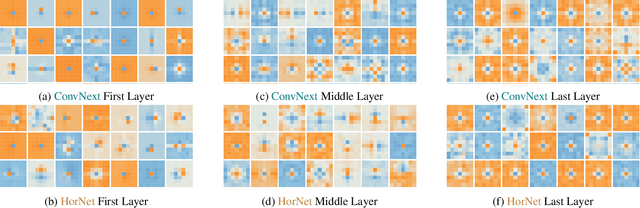
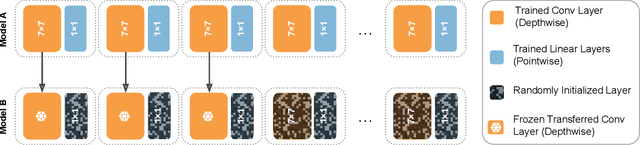
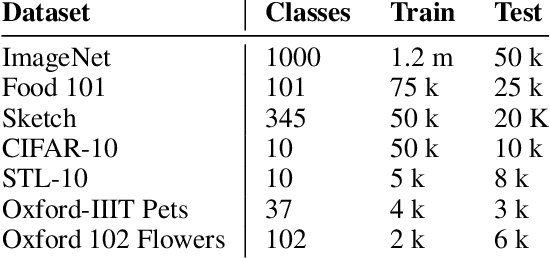
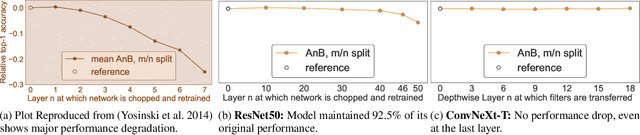
This paper challenges the prevailing view that convolutional neural network (CNN) filters become increasingly specialized in deeper layers. Motivated by recent observations of clusterable repeating patterns in depthwise separable CNNs (DS-CNNs) trained on ImageNet, we extend this investigation across various domains and datasets. Our analysis of DS-CNNs reveals that deep filters maintain generality, contradicting the expected transition to class-specific filters. We demonstrate the generalizability of these filters through transfer learning experiments, showing that frozen filters from models trained on different datasets perform well and can be further improved when sourced from larger datasets. Our findings indicate that spatial features learned by depthwise separable convolutions remain generic across all layers, domains, and architectures. This research provides new insights into the nature of generalization in neural networks, particularly in DS-CNNs, and has significant implications for transfer learning and model design.
A quantum-classical reinforcement learning model to play Atari games
Dec 11, 2024Recent advances in reinforcement learning have demonstrated the potential of quantum learning models based on parametrized quantum circuits as an alternative to deep learning models. On the one hand, these findings have shown the ultimate exponential speed-ups in learning that full-blown quantum models can offer in certain -- artificially constructed -- environments. On the other hand, they have demonstrated the ability of experimentally accessible PQCs to solve OpenAI Gym benchmarking tasks. However, it remains an open question whether these near-term QRL techniques can be successfully applied to more complex problems exhibiting high-dimensional observation spaces. In this work, we bridge this gap and present a hybrid model combining a PQC with classical feature encoding and post-processing layers that is capable of tackling Atari games. A classical model, subjected to architectural restrictions similar to those present in the hybrid model is constructed to serve as a reference. Our numerical investigation demonstrates that the proposed hybrid model is capable of solving the Pong environment and achieving scores comparable to the classical reference in Breakout. Furthermore, our findings shed light on important hyperparameter settings and design choices that impact the interplay of the quantum and classical components. This work contributes to the understanding of near-term quantum learning models and makes an important step towards their deployment in real-world RL scenarios.
Neuromorphic IoT Architecture for Efficient Water Management: A Smart Village Case Study
Oct 25, 2024The exponential growth of IoT networks necessitates a paradigm shift towards architectures that offer high flexibility and learning capabilities while maintaining low energy consumption, minimal communication overhead, and low latency. Traditional IoT systems, particularly when integrated with machine learning approaches, often suffer from high communication overhead and significant energy consumption. This work addresses these challenges by proposing a neuromorphic architecture inspired by biological systems. To illustrate the practical application of our proposed architecture, we present a case study focusing on water management in the Carinthian community of Neuhaus. Preliminary results regarding water consumption prediction and anomaly detection in this community are presented. We also introduce a novel neuromorphic IoT architecture that integrates biological principles into the design of IoT systems. This architecture is specifically tailored for edge computing scenarios, where low power and high efficiency are crucial. Our approach leverages the inherent advantages of neuromorphic computing, such as asynchronous processing and event-driven communication, to create an IoT framework that is both energy-efficient and responsive. This case study demonstrates how the neuromorphic IoT architecture can be deployed in a real-world scenario, highlighting its benefits in terms of energy savings, reduced communication overhead, and improved system responsiveness.
Scalable Offline Reinforcement Learning for Mean Field Games
Oct 23, 2024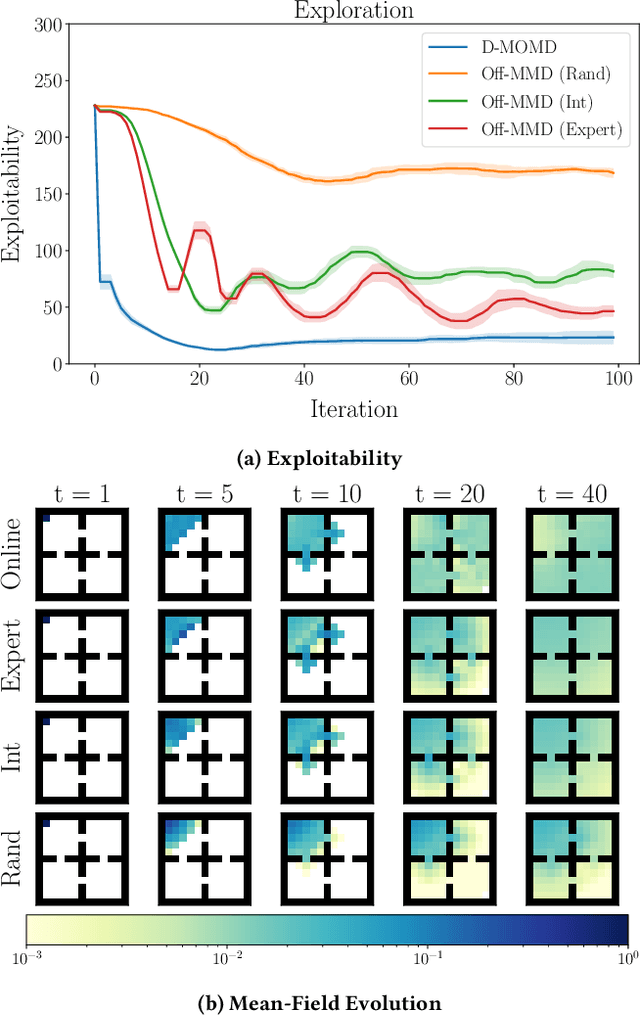



Reinforcement learning algorithms for mean-field games offer a scalable framework for optimizing policies in large populations of interacting agents. Existing methods often depend on online interactions or access to system dynamics, limiting their practicality in real-world scenarios where such interactions are infeasible or difficult to model. In this paper, we present Offline Munchausen Mirror Descent (Off-MMD), a novel mean-field RL algorithm that approximates equilibrium policies in mean-field games using purely offline data. By leveraging iterative mirror descent and importance sampling techniques, Off-MMD estimates the mean-field distribution from static datasets without relying on simulation or environment dynamics. Additionally, we incorporate techniques from offline reinforcement learning to address common issues like Q-value overestimation, ensuring robust policy learning even with limited data coverage. Our algorithm scales to complex environments and demonstrates strong performance on benchmark tasks like crowd exploration or navigation, highlighting its applicability to real-world multi-agent systems where online experimentation is infeasible. We empirically demonstrate the robustness of Off-MMD to low-quality datasets and conduct experiments to investigate its sensitivity to hyperparameter choices.