 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScenario-Based Curriculum Generation for Multi-Agent Autonomous Driving
Mar 26, 2024The automated generation of diverse and complex training scenarios has been an important ingredient in many complex learning tasks. Especially in real-world application domains, such as autonomous driving, auto-curriculum generation is considered vital for obtaining robust and general policies. However, crafting traffic scenarios with multiple, heterogeneous agents is typically considered as a tedious and time-consuming task, especially in more complex simulation environments. In our work, we introduce MATS-Gym, a Multi-Agent Traffic Scenario framework to train agents in CARLA, a high-fidelity driving simulator. MATS-Gym is a multi-agent training framework for autonomous driving that uses partial scenario specifications to generate traffic scenarios with variable numbers of agents. This paper unifies various existing approaches to traffic scenario description into a single training framework and demonstrates how it can be integrated with techniques from unsupervised environment design to automate the generation of adaptive auto-curricula. The code is available at https://github.com/AutonomousDrivingExaminer/mats-gym.
Challenges of engineering safe and secure highly automated vehicles
Mar 10, 2021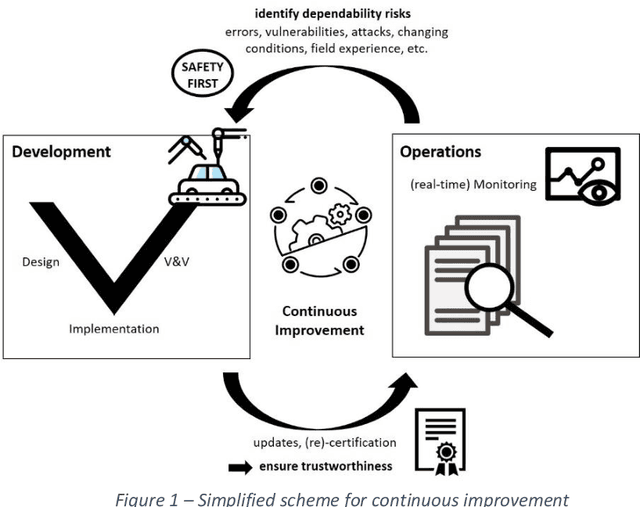

After more than a decade of intense focus on automated vehicles, we are still facing huge challenges for the vision of fully autonomous driving to become a reality. The same "disillusionment" is true in many other domains, in which autonomous Cyber-Physical Systems (CPS) could considerably help to overcome societal challenges and be highly beneficial to society and individuals. Taking the automotive domain, i.e. highly automated vehicles (HAV), as an example, this paper sets out to summarize the major challenges that are still to overcome for achieving safe, secure, reliable and trustworthy highly automated resp. autonomous CPS. We constrain ourselves to technical challenges, acknowledging the importance of (legal) regulations, certification, standardization, ethics, and societal acceptance, to name but a few, without delving deeper into them as this is beyond the scope of this paper. Four challenges have been identified as being the main obstacles to realizing HAV: Realization of continuous, post-deployment systems improvement, handling of uncertainties and incomplete information, verification of HAV with machine learning components, and prediction. Each of these challenges is described in detail, including sub-challenges and, where appropriate, possible approaches to overcome them. By working together in a common effort between industry and academy and focusing on these challenges, the authors hope to contribute to overcome the "disillusionment" for realizing HAV.