 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScenario-Based Curriculum Generation for Multi-Agent Autonomous Driving
Mar 26, 2024The automated generation of diverse and complex training scenarios has been an important ingredient in many complex learning tasks. Especially in real-world application domains, such as autonomous driving, auto-curriculum generation is considered vital for obtaining robust and general policies. However, crafting traffic scenarios with multiple, heterogeneous agents is typically considered as a tedious and time-consuming task, especially in more complex simulation environments. In our work, we introduce MATS-Gym, a Multi-Agent Traffic Scenario framework to train agents in CARLA, a high-fidelity driving simulator. MATS-Gym is a multi-agent training framework for autonomous driving that uses partial scenario specifications to generate traffic scenarios with variable numbers of agents. This paper unifies various existing approaches to traffic scenario description into a single training framework and demonstrates how it can be integrated with techniques from unsupervised environment design to automate the generation of adaptive auto-curricula. The code is available at https://github.com/AutonomousDrivingExaminer/mats-gym.
Learning Adaptive Safety for Multi-Agent Systems
Sep 19, 2023Ensuring safety in dynamic multi-agent systems is challenging due to limited information about the other agents. Control Barrier Functions (CBFs) are showing promise for safety assurance but current methods make strong assumptions about other agents and often rely on manual tuning to balance safety, feasibility, and performance. In this work, we delve into the problem of adaptive safe learning for multi-agent systems with CBF. We show how emergent behavior can be profoundly influenced by the CBF configuration, highlighting the necessity for a responsive and dynamic approach to CBF design. We present ASRL, a novel adaptive safe RL framework, to fully automate the optimization of policy and CBF coefficients, to enhance safety and long-term performance through reinforcement learning. By directly interacting with the other agents, ASRL learns to cope with diverse agent behaviours and maintains the cost violations below a desired limit. We evaluate ASRL in a multi-robot system and a competitive multi-agent racing scenario, against learning-based and control-theoretic approaches. We empirically demonstrate the efficacy and flexibility of ASRL, and assess generalization and scalability to out-of-distribution scenarios. Code and supplementary material are public online.
Enhancing Robot Learning through Learned Human-Attention Feature Maps
Aug 29, 2023
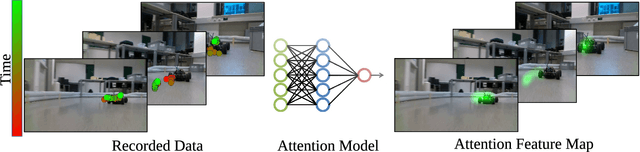


Robust and efficient learning remains a challenging problem in robotics, in particular with complex visual inputs. Inspired by human attention mechanism, with which we quickly process complex visual scenes and react to changes in the environment, we think that embedding auxiliary information about focus point into robot learning would enhance efficiency and robustness of the learning process. In this paper, we propose a novel approach to model and emulate the human attention with an approximate prediction model. We then leverage this output and feed it as a structured auxiliary feature map into downstream learning tasks. We validate this idea by learning a prediction model from human-gaze recordings of manual driving in the real world. We test our approach on two learning tasks - object detection and imitation learning. Our experiments demonstrate that the inclusion of predicted human attention leads to improved robustness of the trained models to out-of-distribution samples and faster learning in low-data regime settings. Our work highlights the potential of incorporating structured auxiliary information in representation learning for robotics and opens up new avenues for research in this direction. All code and data are available online.
Safe Policy Improvement in Constrained Markov Decision Processes
Oct 20, 2022The automatic synthesis of a policy through reinforcement learning (RL) from a given set of formal requirements depends on the construction of a reward signal and consists of the iterative application of many policy-improvement steps. The synthesis algorithm has to balance target, safety, and comfort requirements in a single objective and to guarantee that the policy improvement does not increase the number of safety-requirements violations, especially for safety-critical applications. In this work, we present a solution to the synthesis problem by solving its two main challenges: reward-shaping from a set of formal requirements and safe policy update. For the former, we propose an automatic reward-shaping procedure, defining a scalar reward signal compliant with the task specification. For the latter, we introduce an algorithm ensuring that the policy is improved in a safe fashion with high-confidence guarantees. We also discuss the adoption of a model-based RL algorithm to efficiently use the collected data and train a model-free agent on the predicted trajectories, where the safety violation does not have the same impact as in the real world. Finally, we demonstrate in standard control benchmarks that the resulting learning procedure is effective and robust even under heavy perturbations of the hyperparameters.
* Accepted for presentation at the International Symposium on Leveraging Applications of Formal Methods (ISoLA, 2022)
From STL Rulebooks to Rewards
Oct 06, 2021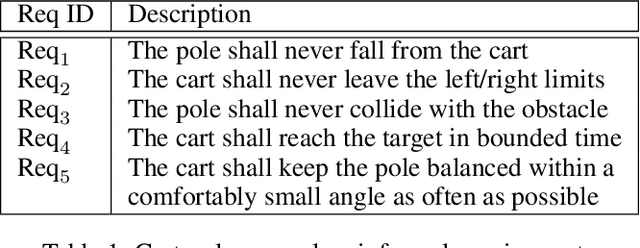

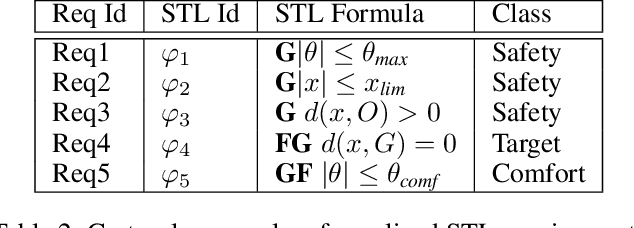
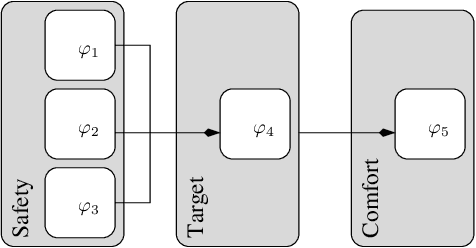
The automatic synthesis of neural-network controllers for autonomous agents through reinforcement learning has to simultaneously optimize many, possibly conflicting, objectives of various importance. This multi-objective optimization task is reflected in the shape of the reward function, which is most often the result of an ad-hoc and crafty-like activity. In this paper we propose a principled approach to shaping rewards for reinforcement learning from multiple objectives that are given as a partially-ordered set of signal-temporal-logic (STL) rules. To this end, we first equip STL with a novel quantitative semantics allowing to automatically evaluate individual requirements. We then develop a method for systematically combining evaluations of multiple requirements into a single reward that takes into account the priorities defined by the partial order. We finally evaluate our approach on several case studies, demonstrating its practical applicability.
Model-based versus Model-free Deep Reinforcement Learning for Autonomous Racing Cars
Mar 08, 2021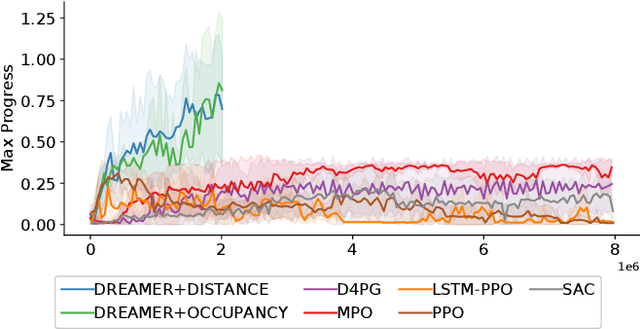
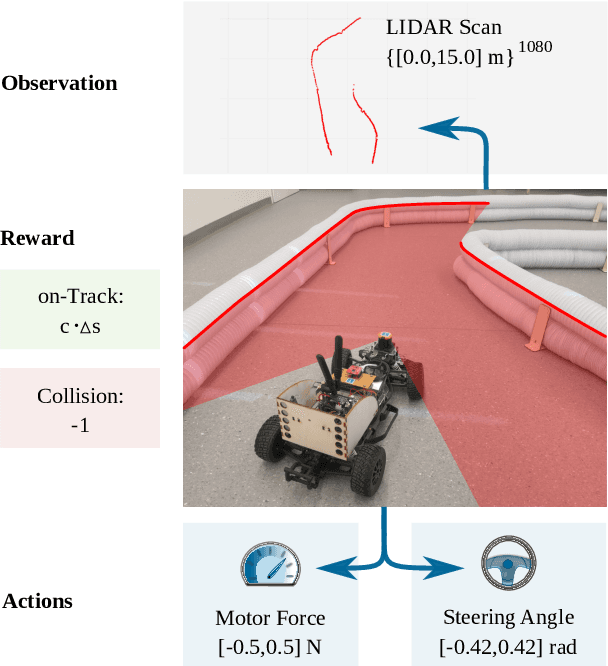
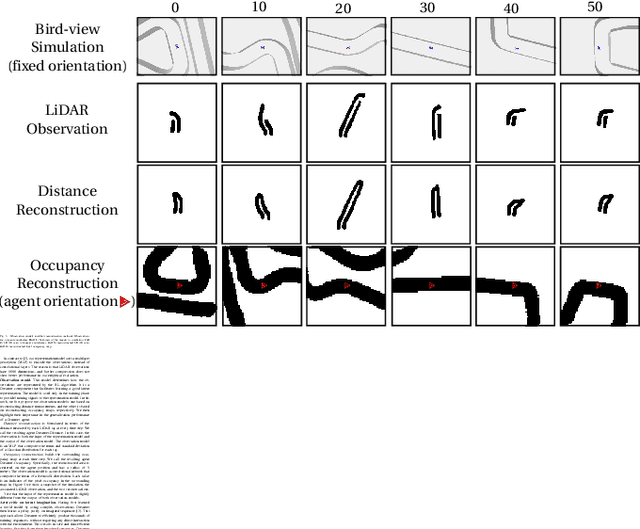
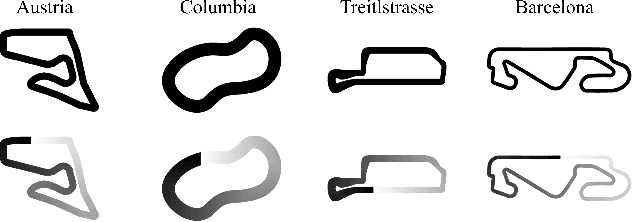
Despite the rich theoretical foundation of model-based deep reinforcement learning (RL) agents, their effectiveness in real-world robotics-applications is less studied and understood. In this paper, we, therefore, investigate how such agents generalize to real-world autonomous-vehicle control-tasks, where advanced model-free deep RL algorithms fail. In particular, we set up a series of time-lap tasks for an F1TENTH racing robot, equipped with high-dimensional LiDAR sensors, on a set of test tracks with a gradual increase in their complexity. In this continuous-control setting, we show that model-based agents capable of learning in imagination, substantially outperform model-free agents with respect to performance, sample efficiency, successful task completion, and generalization. Moreover, we show that the generalization ability of model-based agents strongly depends on the observation-model choice. Finally, we provide extensive empirical evidence for the effectiveness of model-based agents provided with long enough memory horizons in sim2real tasks.