 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom STL Rulebooks to Rewards
Paper and Code
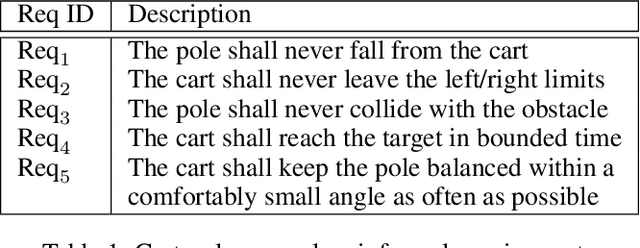

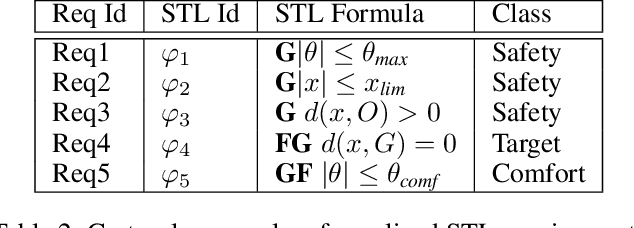
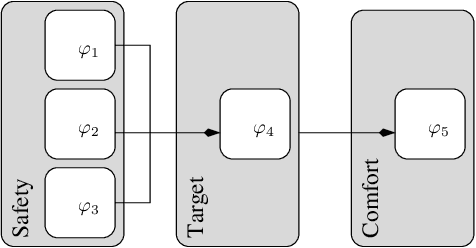
The automatic synthesis of neural-network controllers for autonomous agents through reinforcement learning has to simultaneously optimize many, possibly conflicting, objectives of various importance. This multi-objective optimization task is reflected in the shape of the reward function, which is most often the result of an ad-hoc and crafty-like activity. In this paper we propose a principled approach to shaping rewards for reinforcement learning from multiple objectives that are given as a partially-ordered set of signal-temporal-logic (STL) rules. To this end, we first equip STL with a novel quantitative semantics allowing to automatically evaluate individual requirements. We then develop a method for systematically combining evaluations of multiple requirements into a single reward that takes into account the priorities defined by the partial order. We finally evaluate our approach on several case studies, demonstrating its practical applicability.