 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeclarative Scenario-based Testing with RoadLogic
Mar 10, 2026Scenario-based testing is a key method for cost-effective and safe validation of autonomous vehicles (AVs). Existing approaches rely on imperative scenario definitions, requiring developers to manually enumerate numerous variants to achieve coverage. Declarative languages, such as OpenSCENARIO DSL (OS2), raise the abstraction level but lack systematic methods for instantiating concrete, specification-compliant scenarios as simulations. To our knowledge, currently, no open-source solution provides this capability. We present RoadLogic that bridges declarative OS2 specifications and executable simulations. It uses Answer Set Programming to generate abstract plans satisfying scenario constraints, motion planning to refine the plans into feasible trajectories, and specification-based monitoring to verify correctness. We evaluate RoadLogic on instantiating representative OS2 scenarios as simulations in the CommonRoad framework. Results show that RoadLogic consistently produces realistic, specification-satisfying simulations within minutes and captures diverse behavioral variants through parameter sampling, thus opening the door to systematic scenario-based testing for autonomous driving systems.
From STL Rulebooks to Rewards
Oct 06, 2021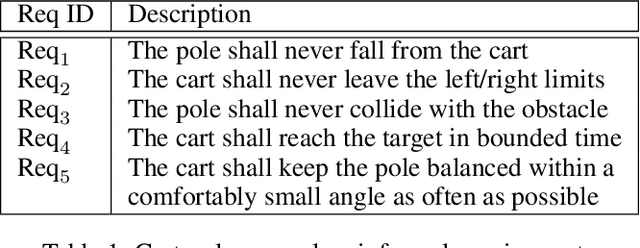

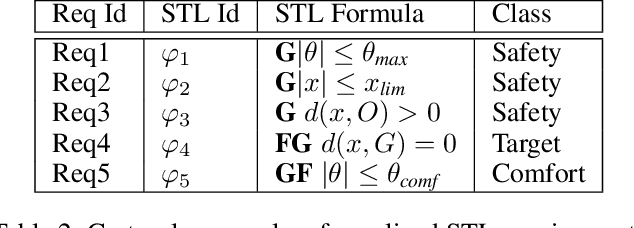
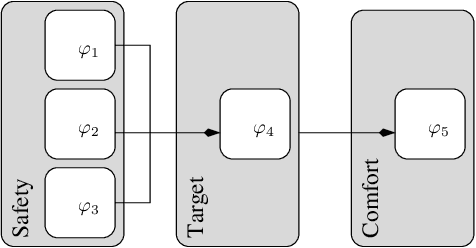
The automatic synthesis of neural-network controllers for autonomous agents through reinforcement learning has to simultaneously optimize many, possibly conflicting, objectives of various importance. This multi-objective optimization task is reflected in the shape of the reward function, which is most often the result of an ad-hoc and crafty-like activity. In this paper we propose a principled approach to shaping rewards for reinforcement learning from multiple objectives that are given as a partially-ordered set of signal-temporal-logic (STL) rules. To this end, we first equip STL with a novel quantitative semantics allowing to automatically evaluate individual requirements. We then develop a method for systematically combining evaluations of multiple requirements into a single reward that takes into account the priorities defined by the partial order. We finally evaluate our approach on several case studies, demonstrating its practical applicability.
From English to Signal Temporal Logic
Sep 21, 2021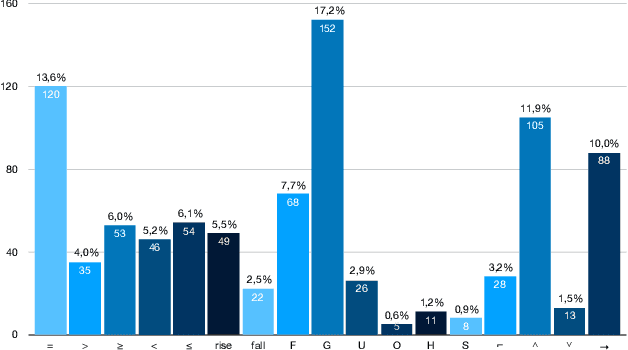
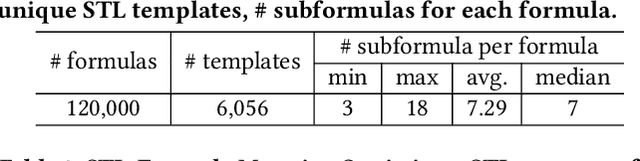
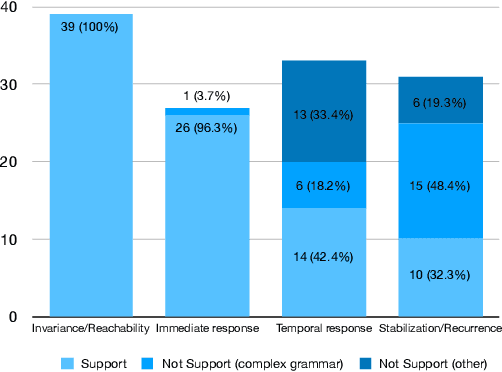
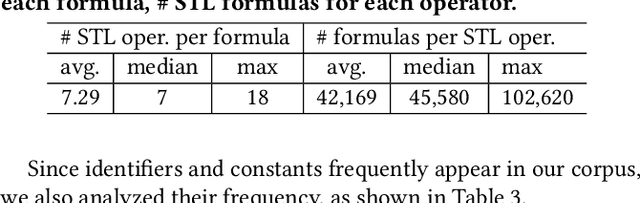
Formal methods provide very powerful tools and techniques for the design and analysis of complex systems. Their practical application remains however limited, due to the widely accepted belief that formal methods require extensive expertise and a steep learning curve. Writing correct formal specifications in form of logical formulas is still considered to be a difficult and error prone task. In this paper we propose DeepSTL, a tool and technique for the translation of informal requirements, given as free English sentences, into Signal Temporal Logic (STL), a formal specification language for cyber-physical systems, used both by academia and advanced research labs in industry. A major challenge to devise such a translator is the lack of publicly available informal requirements and formal specifications. We propose a two-step workflow to address this challenge. We first design a grammar-based generation technique of synthetic data, where each output is a random STL formula and its associated set of possible English translations. In the second step, we use a state-of-the-art transformer-based neural translation technique, to train an accurate attentional translator of English to STL. The experimental results show high translation quality for patterns of English requirements that have been well trained, making this workflow promising to be extended for processing more complex translation tasks.
Challenges of engineering safe and secure highly automated vehicles
Mar 10, 2021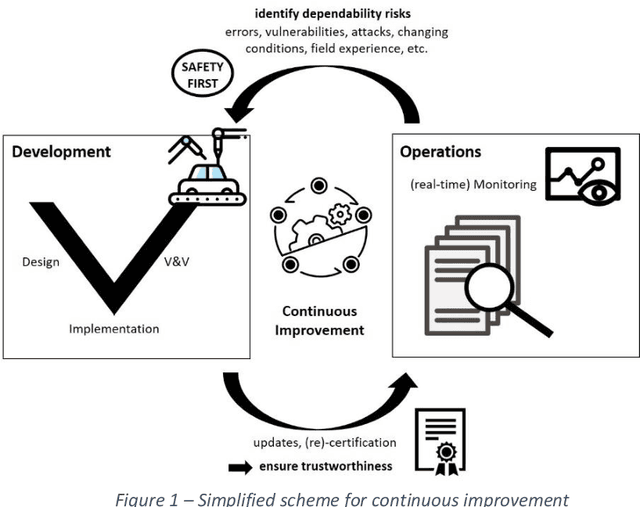

After more than a decade of intense focus on automated vehicles, we are still facing huge challenges for the vision of fully autonomous driving to become a reality. The same "disillusionment" is true in many other domains, in which autonomous Cyber-Physical Systems (CPS) could considerably help to overcome societal challenges and be highly beneficial to society and individuals. Taking the automotive domain, i.e. highly automated vehicles (HAV), as an example, this paper sets out to summarize the major challenges that are still to overcome for achieving safe, secure, reliable and trustworthy highly automated resp. autonomous CPS. We constrain ourselves to technical challenges, acknowledging the importance of (legal) regulations, certification, standardization, ethics, and societal acceptance, to name but a few, without delving deeper into them as this is beyond the scope of this paper. Four challenges have been identified as being the main obstacles to realizing HAV: Realization of continuous, post-deployment systems improvement, handling of uncertainties and incomplete information, verification of HAV with machine learning components, and prediction. Each of these challenges is described in detail, including sub-challenges and, where appropriate, possible approaches to overcome them. By working together in a common effort between industry and academy and focusing on these challenges, the authors hope to contribute to overcome the "disillusionment" for realizing HAV.