 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContext-aware, Ante-hoc Explanations of Driving Behaviour
Nov 18, 2025Autonomous vehicles (AVs) must be both safe and trustworthy to gain social acceptance and become a viable option for everyday public transportation. Explanations about the system behaviour can increase safety and trust in AVs. Unfortunately, explaining the system behaviour of AI-based driving functions is particularly challenging, as decision-making processes are often opaque. The field of Explainability Engineering tackles this challenge by developing explanation models at design time. These models are designed from system design artefacts and stakeholder needs to develop correct and good explanations. To support this field, we propose an approach that enables context-aware, ante-hoc explanations of (un)expectable driving manoeuvres at runtime. The visual yet formal language Traffic Sequence Charts is used to formalise explanation contexts, as well as corresponding (un)expectable driving manoeuvres. A dedicated runtime monitoring enables context-recognition and ante-hoc presentation of explanations at runtime. In combination, we aim to support the bridging of correct and good explanations. Our method is demonstrated in a simulated overtaking.
* In Proceedings FMAS 2025, arXiv:2511.13245
On Scenario Formalisms for Automated Driving
Apr 07, 2025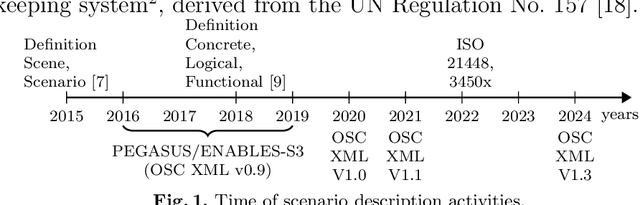
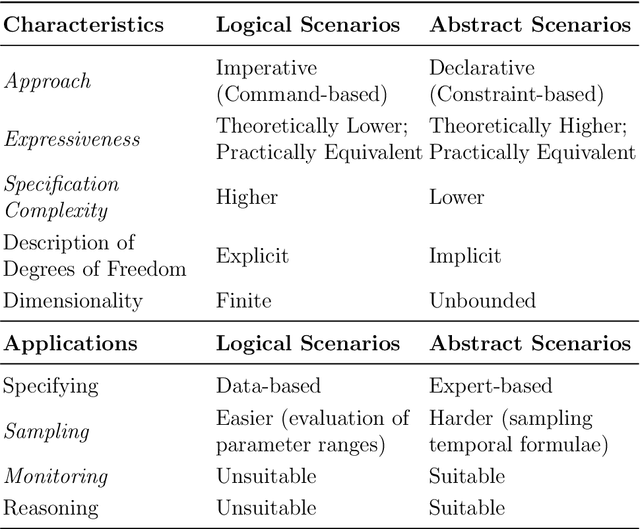
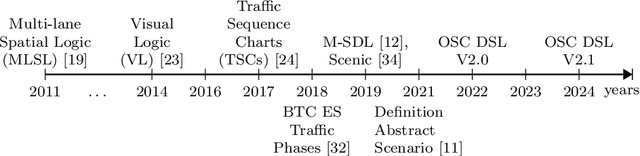

The concept of scenario and its many qualifications -- specifically logical and abstract scenarios -- have emerged as a foundational element in safeguarding automated driving systems. However, the original linguistic definitions of the different scenario qualifications were often applied ambiguously, leading to a divergence between scenario description languages proposed or standardized in practice and their terminological foundation. This resulted in confusion about the unique features as well as strengths and weaknesses of logical and abstract scenarios. To alleviate this, we give clear linguistic definitions for the scenario qualifications concrete, logical, and abstract scenario and propose generic, unifying formalisms using curves, mappings to sets of curves, and temporal logics, respectively. We demonstrate that these formalisms allow pinpointing strengths and weaknesses precisely by comparing expressiveness, specification complexity, sampling, and monitoring of logical and abstract scenarios. Our work hence enables the practitioner to comprehend the different scenario qualifications and identify a suitable formalism.
Challenges of engineering safe and secure highly automated vehicles
Mar 10, 2021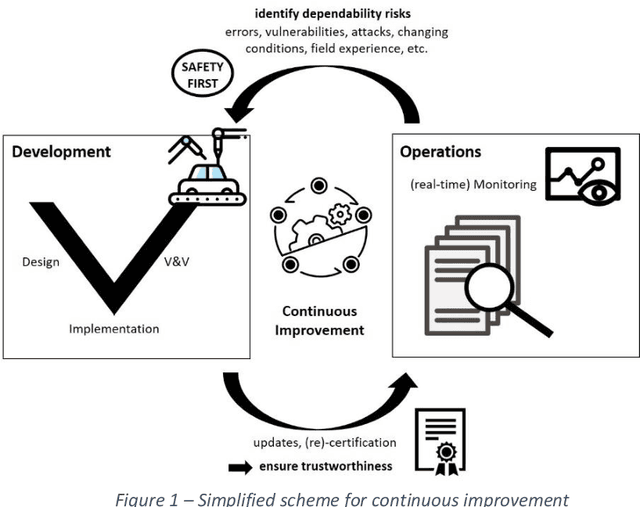

After more than a decade of intense focus on automated vehicles, we are still facing huge challenges for the vision of fully autonomous driving to become a reality. The same "disillusionment" is true in many other domains, in which autonomous Cyber-Physical Systems (CPS) could considerably help to overcome societal challenges and be highly beneficial to society and individuals. Taking the automotive domain, i.e. highly automated vehicles (HAV), as an example, this paper sets out to summarize the major challenges that are still to overcome for achieving safe, secure, reliable and trustworthy highly automated resp. autonomous CPS. We constrain ourselves to technical challenges, acknowledging the importance of (legal) regulations, certification, standardization, ethics, and societal acceptance, to name but a few, without delving deeper into them as this is beyond the scope of this paper. Four challenges have been identified as being the main obstacles to realizing HAV: Realization of continuous, post-deployment systems improvement, handling of uncertainties and incomplete information, verification of HAV with machine learning components, and prediction. Each of these challenges is described in detail, including sub-challenges and, where appropriate, possible approaches to overcome them. By working together in a common effort between industry and academy and focusing on these challenges, the authors hope to contribute to overcome the "disillusionment" for realizing HAV.