 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Scenario Formalisms for Automated Driving
Apr 07, 2025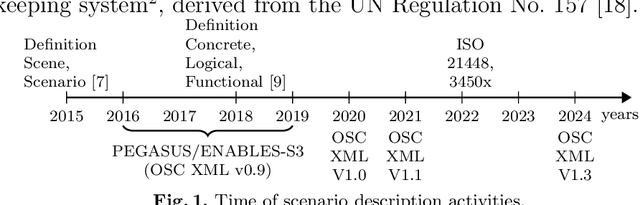
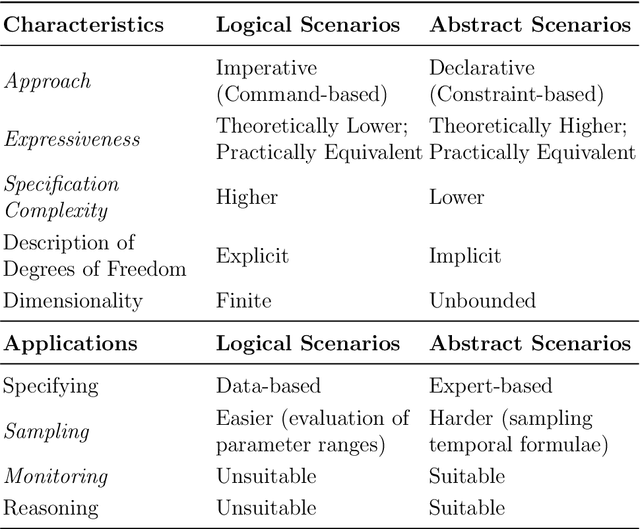
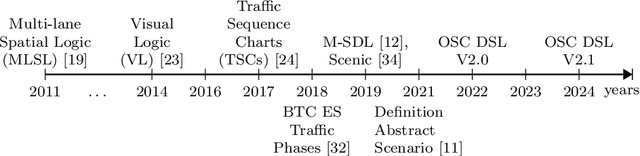

The concept of scenario and its many qualifications -- specifically logical and abstract scenarios -- have emerged as a foundational element in safeguarding automated driving systems. However, the original linguistic definitions of the different scenario qualifications were often applied ambiguously, leading to a divergence between scenario description languages proposed or standardized in practice and their terminological foundation. This resulted in confusion about the unique features as well as strengths and weaknesses of logical and abstract scenarios. To alleviate this, we give clear linguistic definitions for the scenario qualifications concrete, logical, and abstract scenario and propose generic, unifying formalisms using curves, mappings to sets of curves, and temporal logics, respectively. We demonstrate that these formalisms allow pinpointing strengths and weaknesses precisely by comparing expressiveness, specification complexity, sampling, and monitoring of logical and abstract scenarios. Our work hence enables the practitioner to comprehend the different scenario qualifications and identify a suitable formalism.
On Quantification for SOTIF Validation of Automated Driving Systems
Apr 20, 2023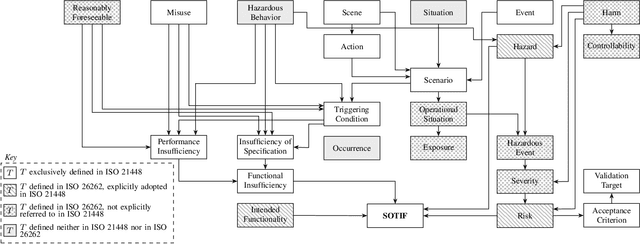
Automated driving systems are safety-critical cyber-physical systems whose safety of the intended functionality (SOTIF) can not be assumed without proper argumentation based on appropriate evidences. Recent advances in standards and regulations on the safety of driving automation are therefore intensely concerned with demonstrating that the intended functionality of these systems does not introduce unreasonable risks to stakeholders. In this work, we critically analyze the ISO 21448 standard which contains requirements and guidance on how the SOTIF can be provably validated. Emphasis lies on developing a consistent terminology as a basis for the subsequent definition of a validation strategy when using quantitative acceptance criteria. In the broad picture, we aim to achieve a well-defined risk decomposition that enables rigorous, quantitative validation approaches for the SOTIF of automated driving systems.
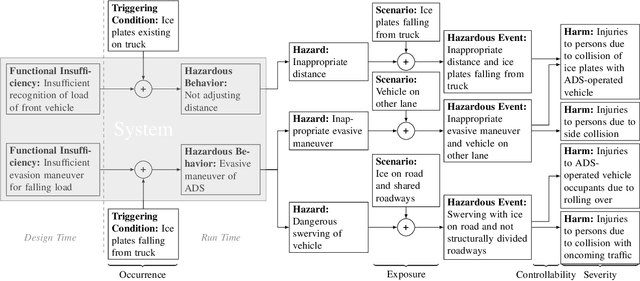
Grasping Causality for the Explanation of Criticality for Automated Driving
Oct 27, 2022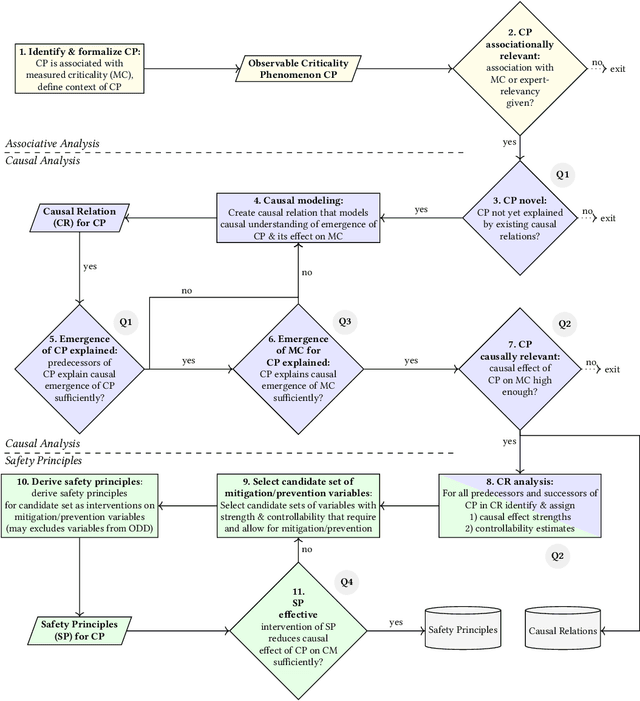
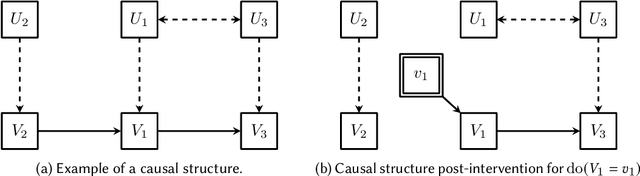
The verification and validation of automated driving systems at SAE levels 4 and 5 is a multi-faceted challenge for which classical statistical considerations become infeasible. For this, contemporary approaches suggest a decomposition into scenario classes combined with statistical analysis thereof regarding the emergence of criticality. Unfortunately, these associational approaches may yield spurious inferences, or worse, fail to recognize the causalities leading to critical scenarios, which are, in turn, prerequisite for the development and safeguarding of automated driving systems. As to incorporate causal knowledge within these processes, this work introduces a formalization of causal queries whose answers facilitate a causal understanding of safety-relevant influencing factors for automated driving. This formalized causal knowledge can be used to specify and implement abstract safety principles that provably reduce the criticality associated with these influencing factors. Based on Judea Pearl's causal theory, we define a causal relation as a causal structure together with a context, both related to a domain ontology, where the focus lies on modeling the effect of such influencing factors on criticality as measured by a suitable metric. As to assess modeling quality, we suggest various quantities and evaluate them on a small example. As availability and quality of data are imperative for validly estimating answers to the causal queries, we also discuss requirements on real-world and synthetic data acquisition. We thereby contribute to establishing causal considerations at the heart of the safety processes that are urgently needed as to ensure the safe operation of automated driving systems.
Using Ontologies for the Formalization and Recognition of Criticality for Automated Driving
May 03, 2022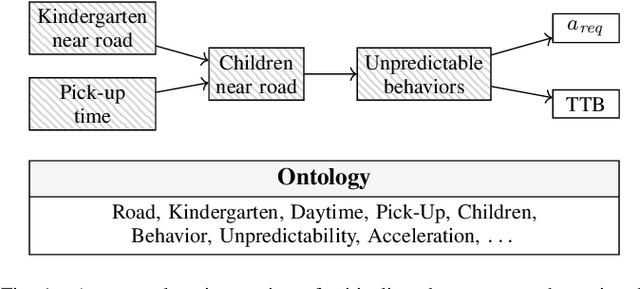
Knowledge representation and reasoning has a long history of examining how knowledge can be formalized, interpreted, and semantically analyzed by machines. In the area of automated vehicles, recent advances suggest the ability to formalize and leverage relevant knowledge as a key enabler in handling the inherently open and complex context of the traffic world. This paper demonstrates ontologies to be a powerful tool for a) modeling and formalization of and b) reasoning about factors associated with criticality in the environment of automated vehicles. For this, we leverage the well-known 6-Layer Model to create a formal representation of the environmental context. Within this representation, an ontology models domain knowledge as logical axioms, enabling deduction on the presence of critical factors within traffic scenes and scenarios. For executing automated analyses, a joint description logic and rule reasoner is used in combination with an a-priori predicate augmentation. We elaborate on the modular approach, present a publicly available implementation, and evaluate the method by means of a large-scale drone data set of urban traffic scenarios.
Criticality Metrics for Automated Driving: A Review and Suitability Analysis of the State of the Art
Aug 05, 2021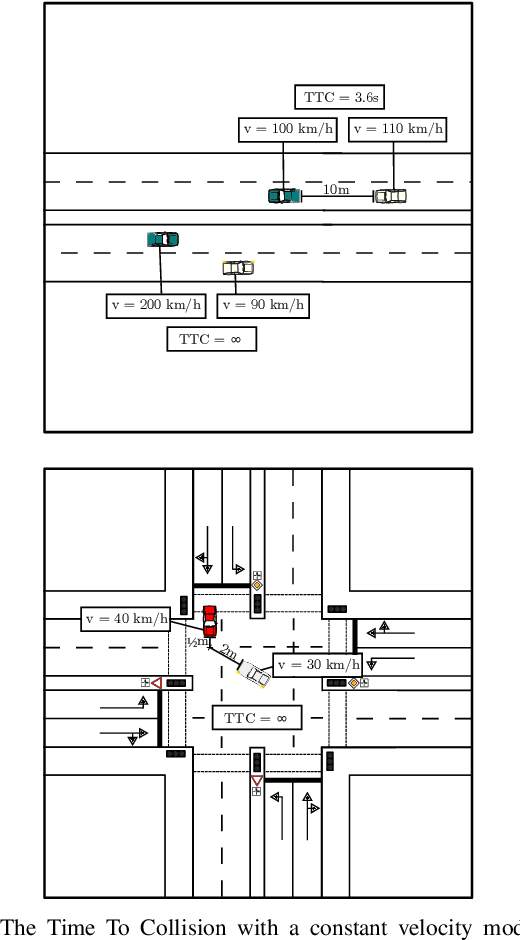
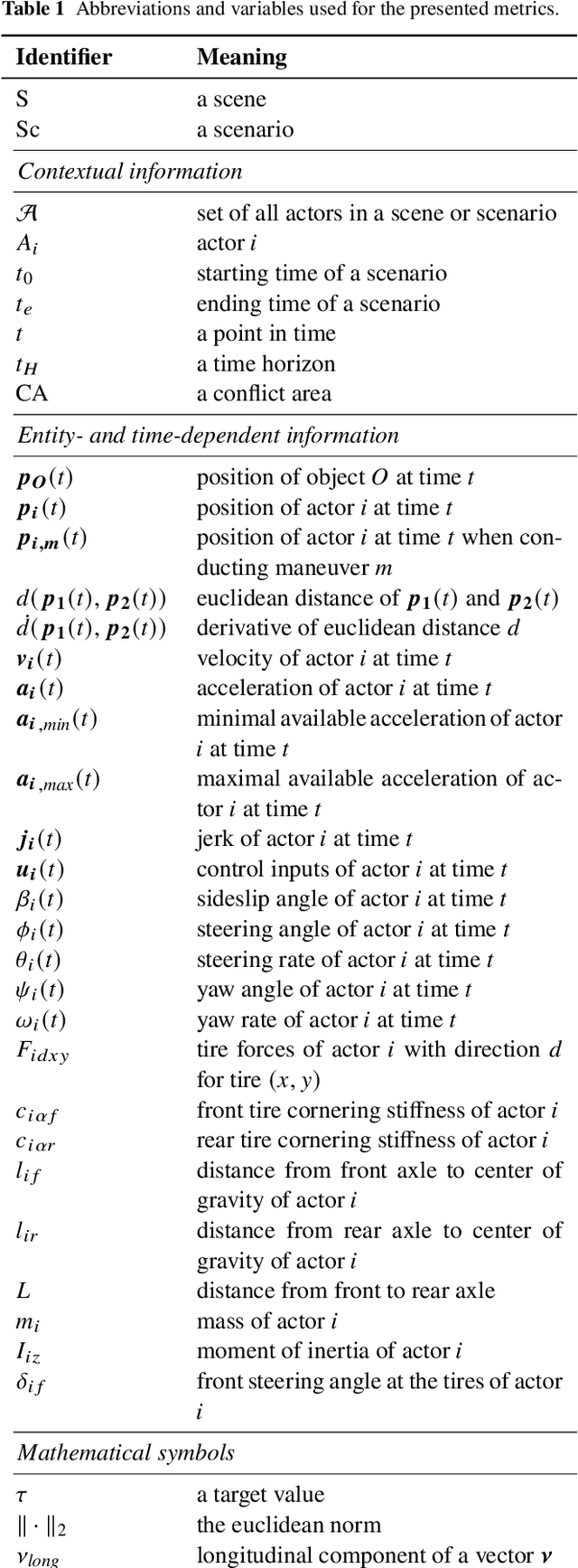
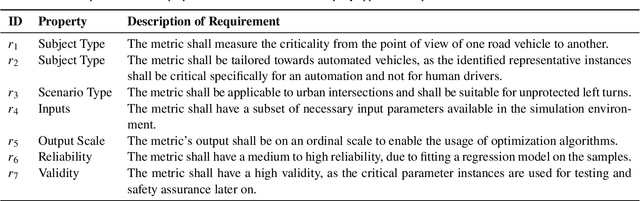
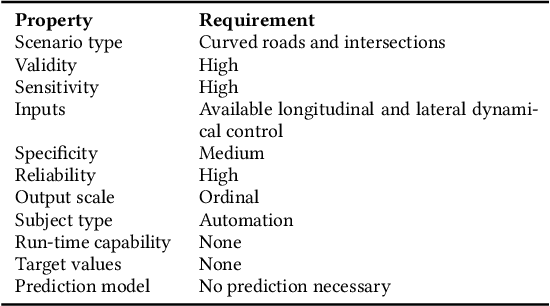
The large-scale deployment of automated vehicles on public roads has the potential to vastly change the transportation modalities of today's society. Although this pursuit has been initiated decades ago, there still exist open challenges in reliably ensuring that such vehicles operate safely in open contexts. While functional safety is a well-established concept, the question of measuring the behavioral safety of a vehicle remains subject to research. One way to both objectively and computationally analyze traffic conflicts is the development and utilization of so-called criticality metrics. Contemporary approaches have leveraged the potential of criticality metrics in various applications related to automated driving, e.g. for computationally assessing the dynamic risk or filtering large data sets to build scenario catalogs. As a prerequisite to systematically choose adequate criticality metrics for such applications, we extensively review the state of the art of criticality metrics, their properties, and their applications in the context of automated driving. Based on this review, we propose a suitability analysis as a methodical tool to be used by practitioners. Both the proposed method and the state of the art review can then be harnessed to select well-suited measurement tools that cover an application's requirements, as demonstrated by an exemplary execution of the analysis. Ultimately, efficient, valid, and reliable measurements of an automated vehicle's safety performance are a key requirement for demonstrating its trustworthiness.
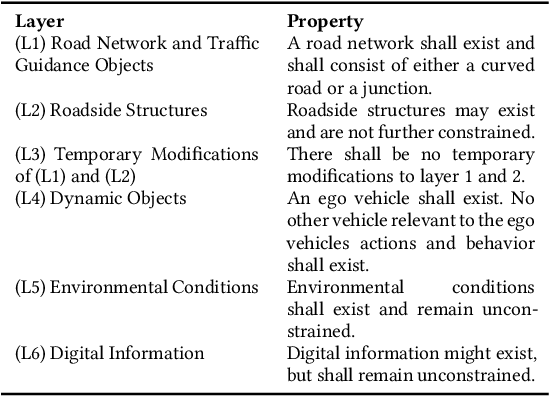
6-Layer Model for a Structured Description and Categorization of Urban Traffic and Environment
Dec 09, 2020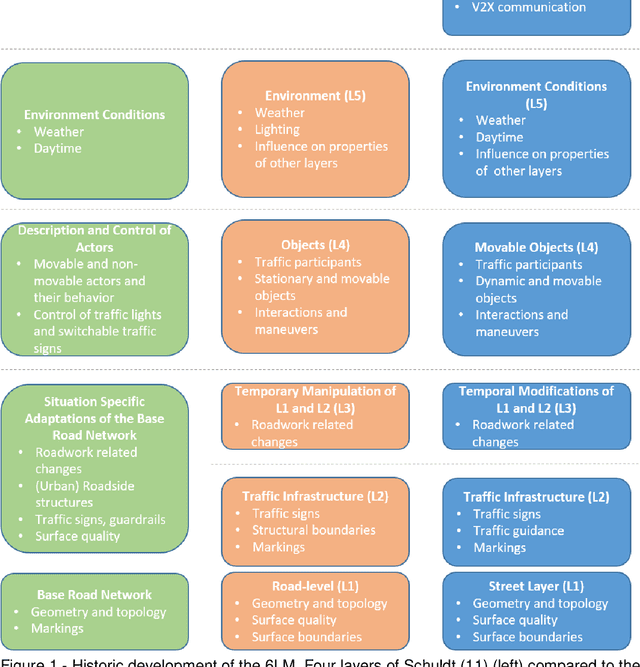
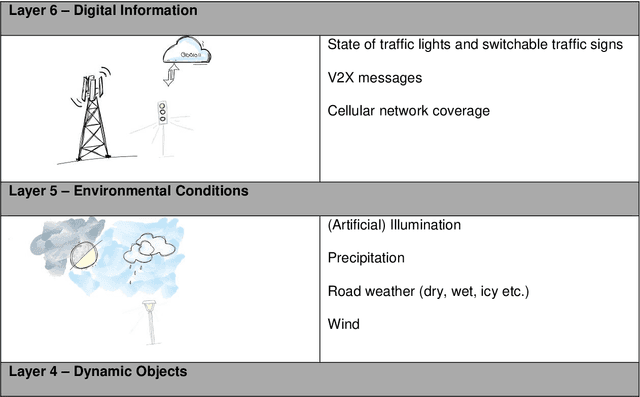
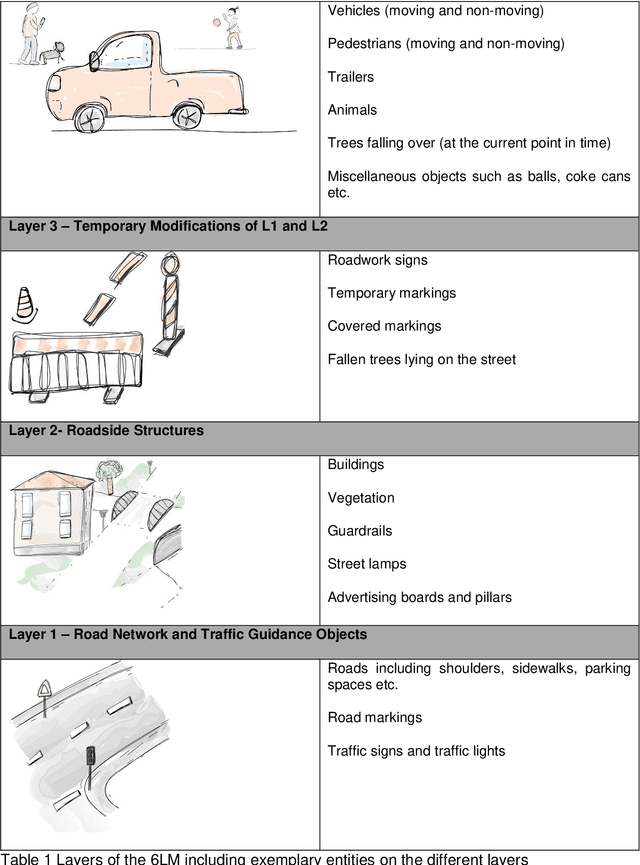
Verification and validation of automated driving functions impose large challenges. Currently, scenario-based approaches are investigated in research and industry, aiming at a reduction of testing efforts by specifying safety relevant scenarios. To define those scenarios and operate in a complex real-world design domain, a structured description of the environment is needed. Within the PEGASUS research project, the 6-Layer Model (6LM) was introduced for the description of highway scenarios. This paper refines the 6LM and extends it to urban traffic and environment. As defined in PEGASUS, the 6LM provides the possibility to categorize the environment and, therefore, functions as a structured basis for subsequent scenario description. The model enables a structured description and categorization of the general environment, without incorporating any knowledge or anticipating any functions of actors. Beyond that, there is a variety of other applications of the 6LM, which are elaborated in this paper. The 6LM includes a description of the road network and traffic guidance objects, roadside structures, temporary modifications of the former, dynamic objects, environmental conditions and digital information. The work at hand specifies each layer by categorizing its items. Guidelines are formulated and explanatory examples are given to standardize the application of the model for an objective environment description. In contrast to previous publications, the model and its design are described in far more detail. Finally, the holistic description of the 6LM presented includes remarks on possible future work when expanding the concept to machine perception aspects.