 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausality-based Transfer of Driving Scenarios to Unseen Intersections
Apr 02, 2024



Scenario-based testing of automated driving functions has become a promising method to reduce time and cost compared to real-world testing. In scenario-based testing automated functions are evaluated in a set of pre-defined scenarios. These scenarios provide information about vehicle behaviors, environmental conditions, or road characteristics using parameters. To create realistic scenarios, parameters and parameter dependencies have to be fitted utilizing real-world data. However, due to the large variety of intersections and movement constellations found in reality, data may not be available for certain scenarios. This paper proposes a methodology to systematically analyze relations between parameters of scenarios. Bayesian networks are utilized to analyze causal dependencies in order to decrease the amount of required data and to transfer causal patterns creating unseen scenarios. Thereby, infrastructural influences on movement patterns are investigated to generate realistic scenarios on unobserved intersections. For evaluation, scenarios and underlying parameters are extracted from the inD dataset. Movement patterns are estimated, transferred and checked against recorded data from those initially unseen intersections.
Using Ontologies for the Formalization and Recognition of Criticality for Automated Driving
May 03, 2022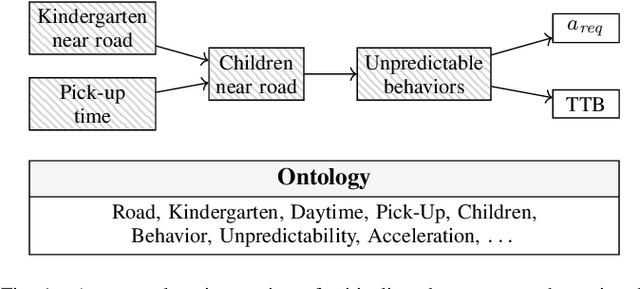
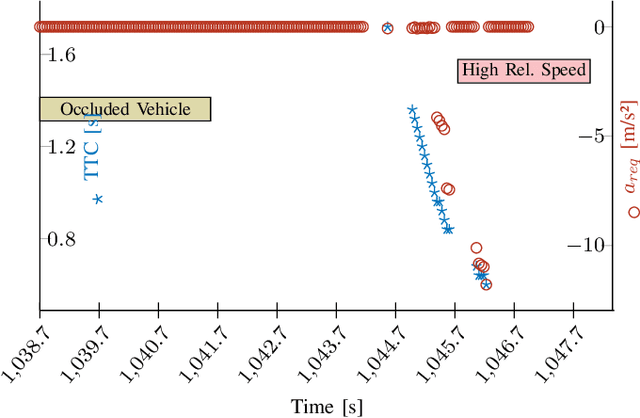
Knowledge representation and reasoning has a long history of examining how knowledge can be formalized, interpreted, and semantically analyzed by machines. In the area of automated vehicles, recent advances suggest the ability to formalize and leverage relevant knowledge as a key enabler in handling the inherently open and complex context of the traffic world. This paper demonstrates ontologies to be a powerful tool for a) modeling and formalization of and b) reasoning about factors associated with criticality in the environment of automated vehicles. For this, we leverage the well-known 6-Layer Model to create a formal representation of the environmental context. Within this representation, an ontology models domain knowledge as logical axioms, enabling deduction on the presence of critical factors within traffic scenes and scenarios. For executing automated analyses, a joint description logic and rule reasoner is used in combination with an a-priori predicate augmentation. We elaborate on the modular approach, present a publicly available implementation, and evaluate the method by means of a large-scale drone data set of urban traffic scenarios.
6-Layer Model for a Structured Description and Categorization of Urban Traffic and Environment
Dec 09, 2020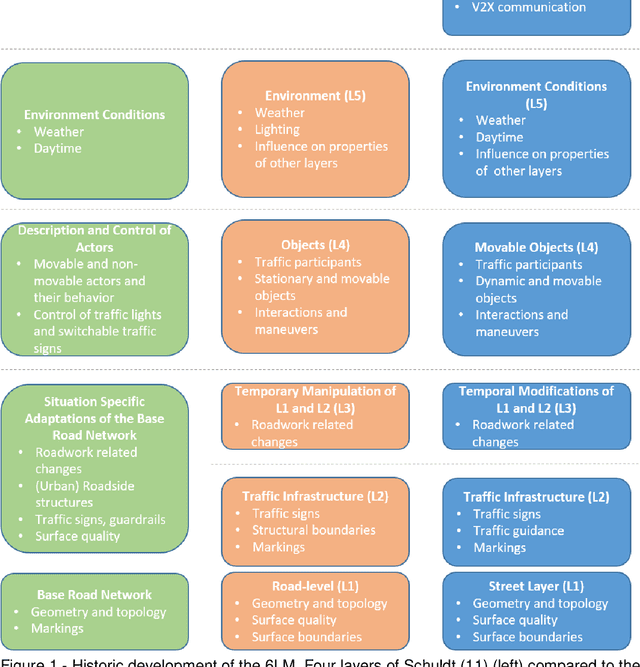
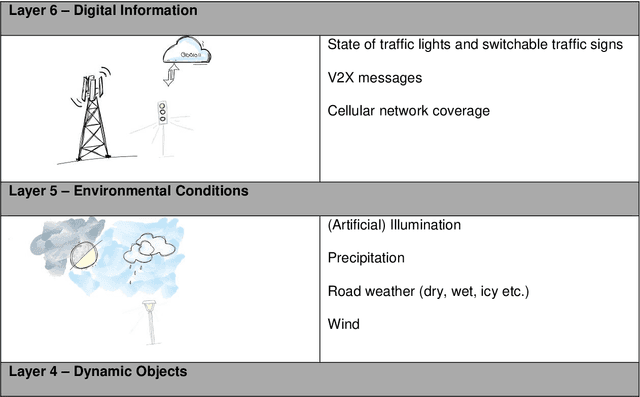
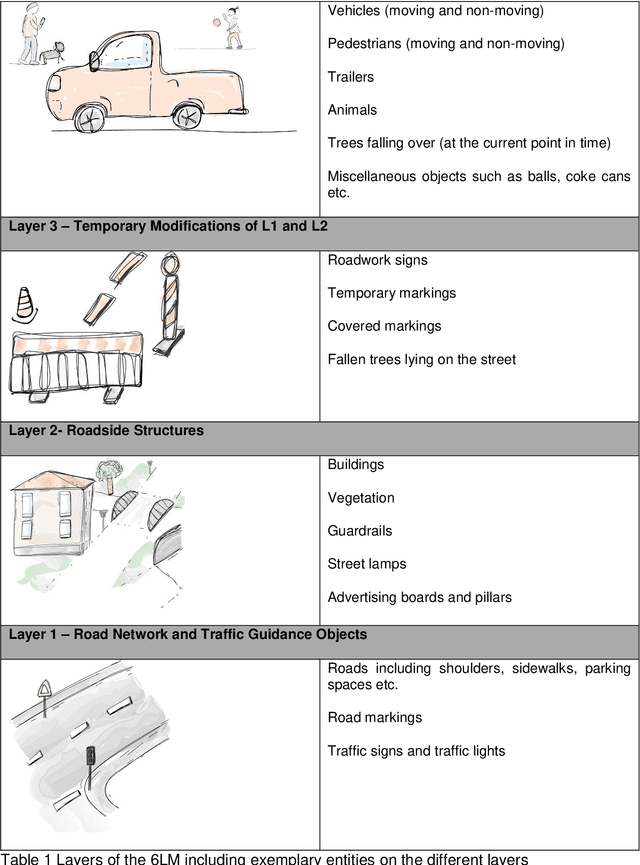
Verification and validation of automated driving functions impose large challenges. Currently, scenario-based approaches are investigated in research and industry, aiming at a reduction of testing efforts by specifying safety relevant scenarios. To define those scenarios and operate in a complex real-world design domain, a structured description of the environment is needed. Within the PEGASUS research project, the 6-Layer Model (6LM) was introduced for the description of highway scenarios. This paper refines the 6LM and extends it to urban traffic and environment. As defined in PEGASUS, the 6LM provides the possibility to categorize the environment and, therefore, functions as a structured basis for subsequent scenario description. The model enables a structured description and categorization of the general environment, without incorporating any knowledge or anticipating any functions of actors. Beyond that, there is a variety of other applications of the 6LM, which are elaborated in this paper. The 6LM includes a description of the road network and traffic guidance objects, roadside structures, temporary modifications of the former, dynamic objects, environmental conditions and digital information. The work at hand specifies each layer by categorizing its items. Guidelines are formulated and explanatory examples are given to standardize the application of the model for an objective environment description. In contrast to previous publications, the model and its design are described in far more detail. Finally, the holistic description of the 6LM presented includes remarks on possible future work when expanding the concept to machine perception aspects.