 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Ontologies for the Formalization and Recognition of Criticality for Automated Driving
May 03, 2022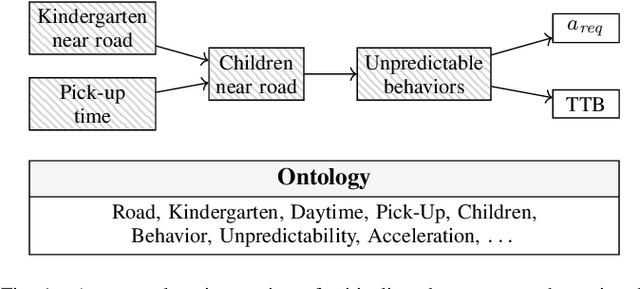
Knowledge representation and reasoning has a long history of examining how knowledge can be formalized, interpreted, and semantically analyzed by machines. In the area of automated vehicles, recent advances suggest the ability to formalize and leverage relevant knowledge as a key enabler in handling the inherently open and complex context of the traffic world. This paper demonstrates ontologies to be a powerful tool for a) modeling and formalization of and b) reasoning about factors associated with criticality in the environment of automated vehicles. For this, we leverage the well-known 6-Layer Model to create a formal representation of the environmental context. Within this representation, an ontology models domain knowledge as logical axioms, enabling deduction on the presence of critical factors within traffic scenes and scenarios. For executing automated analyses, a joint description logic and rule reasoner is used in combination with an a-priori predicate augmentation. We elaborate on the modular approach, present a publicly available implementation, and evaluate the method by means of a large-scale drone data set of urban traffic scenarios.
Criticality Metrics for Automated Driving: A Review and Suitability Analysis of the State of the Art
Aug 05, 2021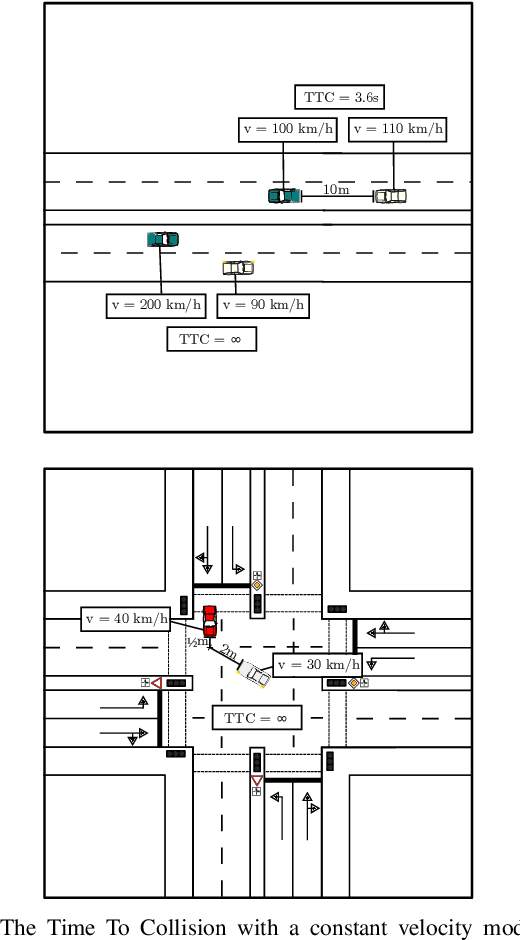
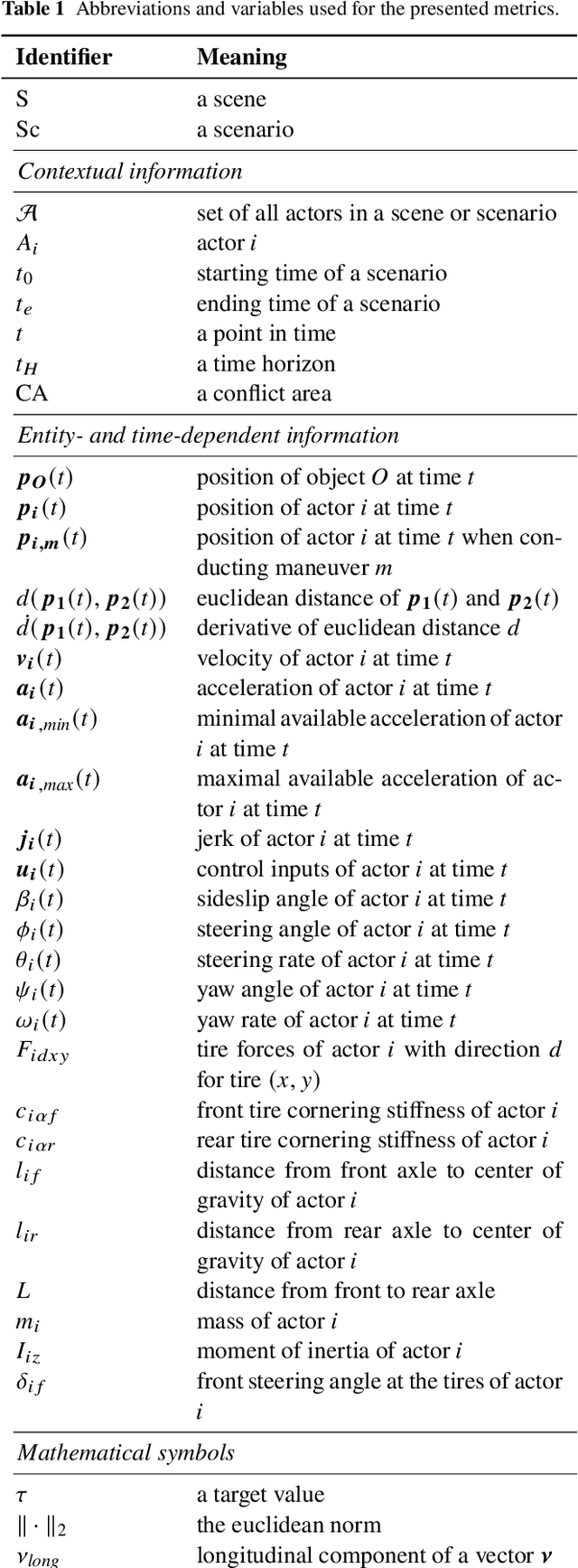
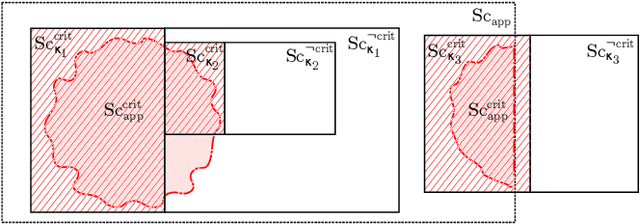
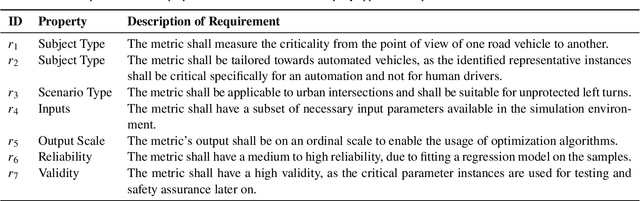
The large-scale deployment of automated vehicles on public roads has the potential to vastly change the transportation modalities of today's society. Although this pursuit has been initiated decades ago, there still exist open challenges in reliably ensuring that such vehicles operate safely in open contexts. While functional safety is a well-established concept, the question of measuring the behavioral safety of a vehicle remains subject to research. One way to both objectively and computationally analyze traffic conflicts is the development and utilization of so-called criticality metrics. Contemporary approaches have leveraged the potential of criticality metrics in various applications related to automated driving, e.g. for computationally assessing the dynamic risk or filtering large data sets to build scenario catalogs. As a prerequisite to systematically choose adequate criticality metrics for such applications, we extensively review the state of the art of criticality metrics, their properties, and their applications in the context of automated driving. Based on this review, we propose a suitability analysis as a methodical tool to be used by practitioners. Both the proposed method and the state of the art review can then be harnessed to select well-suited measurement tools that cover an application's requirements, as demonstrated by an exemplary execution of the analysis. Ultimately, efficient, valid, and reliable measurements of an automated vehicle's safety performance are a key requirement for demonstrating its trustworthiness.