 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Ontologies for the Formalization and Recognition of Criticality for Automated Driving
May 03, 2022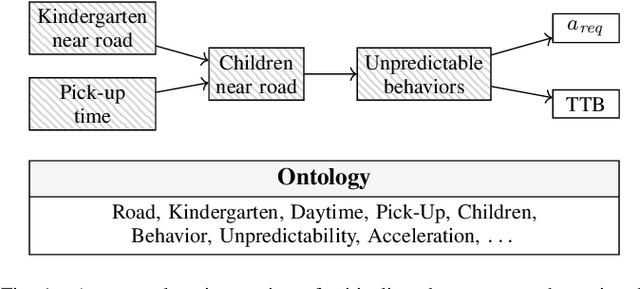
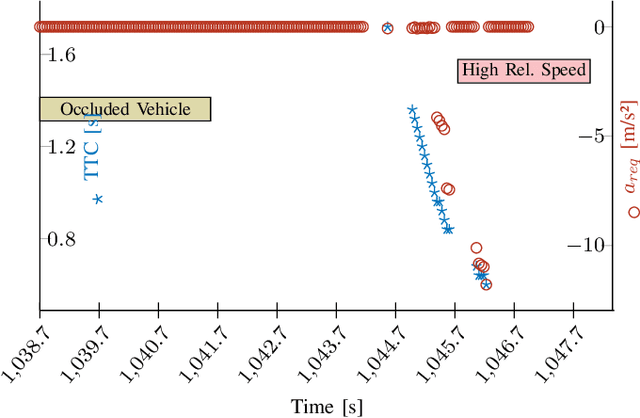
Knowledge representation and reasoning has a long history of examining how knowledge can be formalized, interpreted, and semantically analyzed by machines. In the area of automated vehicles, recent advances suggest the ability to formalize and leverage relevant knowledge as a key enabler in handling the inherently open and complex context of the traffic world. This paper demonstrates ontologies to be a powerful tool for a) modeling and formalization of and b) reasoning about factors associated with criticality in the environment of automated vehicles. For this, we leverage the well-known 6-Layer Model to create a formal representation of the environmental context. Within this representation, an ontology models domain knowledge as logical axioms, enabling deduction on the presence of critical factors within traffic scenes and scenarios. For executing automated analyses, a joint description logic and rule reasoner is used in combination with an a-priori predicate augmentation. We elaborate on the modular approach, present a publicly available implementation, and evaluate the method by means of a large-scale drone data set of urban traffic scenarios.
Systematic Categorization of Influencing Factors on Radar-Based Perception to Facilitate Complex Real-World Data Evaluation
May 01, 2021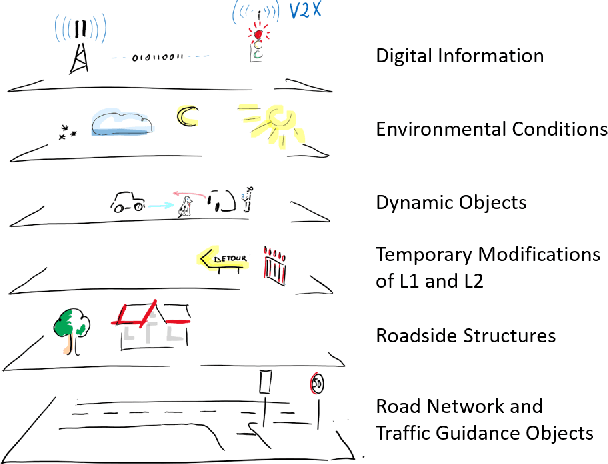
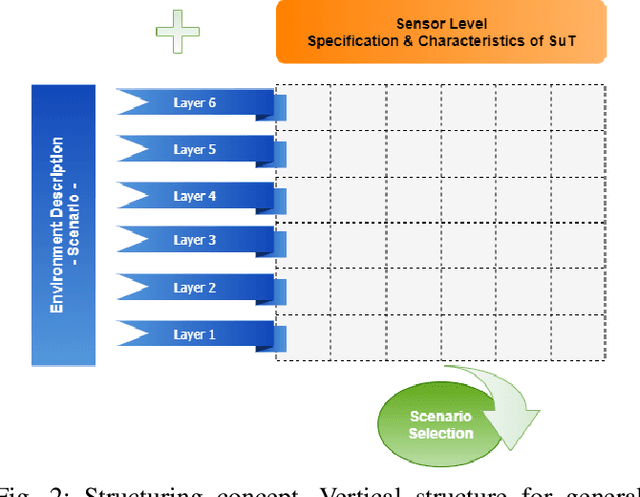
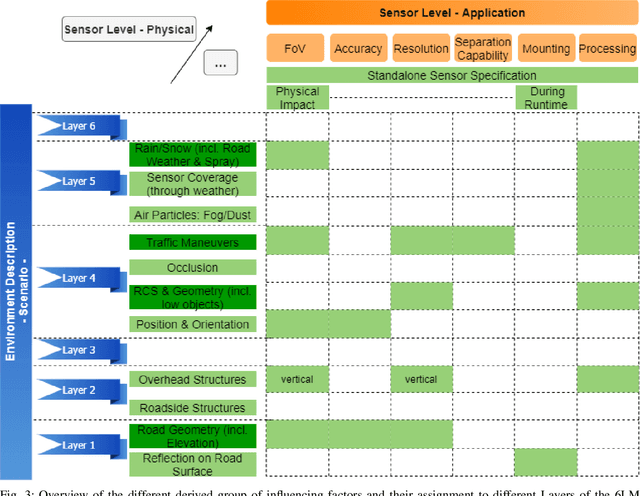
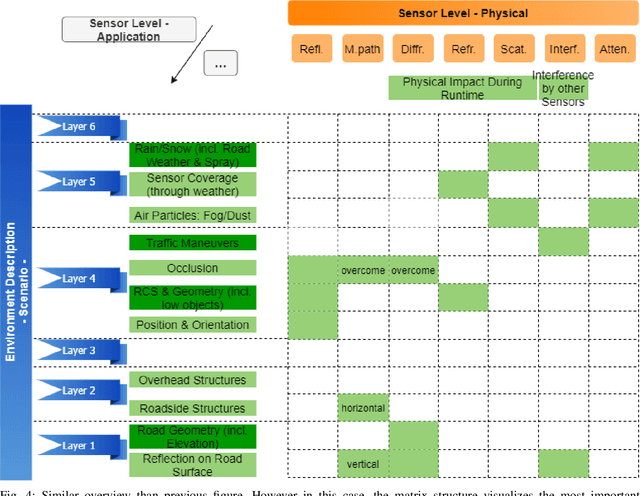
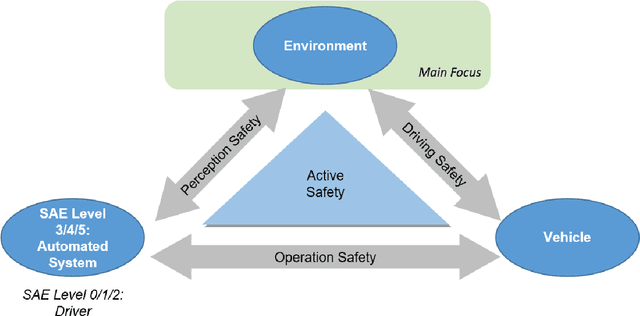
For the assessment of machine perception for automated driving it is important to understand the influence of certain environment factors on the sensors used. Especially when investigating large amounts of real-world data to find and understand perception uncertainties, a smart concept is needed to structure and categorize such complex data depending on the level of detail desired for the investigation. Information on performance limitation causes can support realistic sensor modeling, help determining scenarios containing shortcomings of sensors and above all is essential to reach perception safety. The paper at hand looks into influencing factors on radar sensors. It utilizes the fact that radar sensors have been used in vehicles for several decades already. Therefore, previous findings on influencing factors can be used as a starting point when assessing radar-based perception for driver assistance systems and automated driving functions. On top of the literature review on environment factors influencing radar sensors, the paper introduces a modular structuring concept for such that can facilitate real-world data analysis by categorizing the factors possibly leading to performance limitations into different independent clusters in order to reduce the level of detail in complex real-world environments.
A Review of Testing Object-Based Environment Perception for Safe Automated Driving
Feb 16, 2021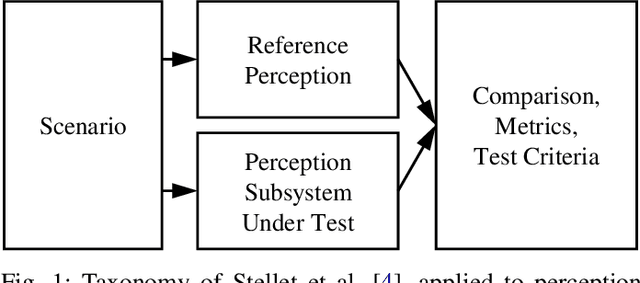
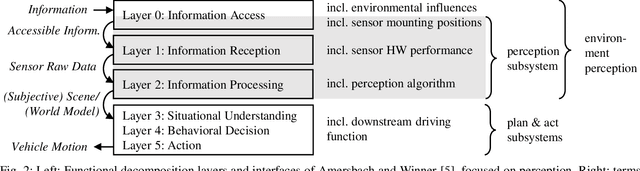
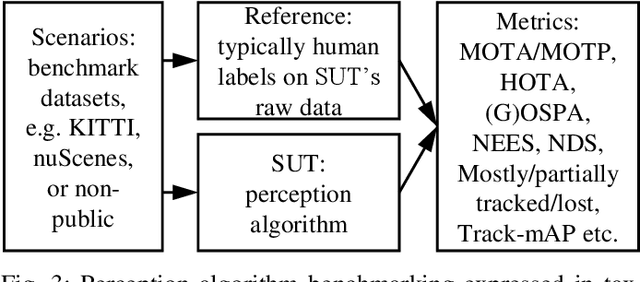
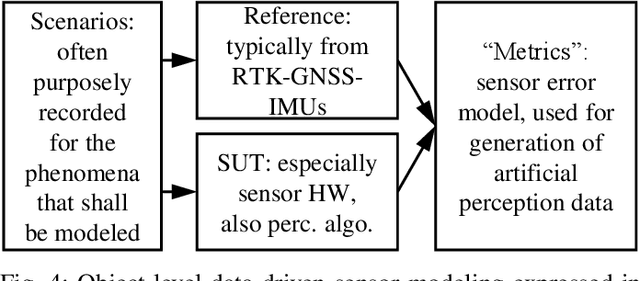
Safety assurance of automated driving systems must consider uncertain environment perception. This paper reviews literature addressing how perception testing is realized as part of safety assurance. We focus on testing for verification and validation purposes at the interface between perception and planning, and structure our analysis along the three axes 1) test criteria and metrics, 2) test scenarios, and 3) reference data. Furthermore, the analyzed literature includes related safety standards, safety-independent perception algorithm benchmarking, and sensor modeling. We find that the realization of safety-aware perception testing remains an open issue since challenges concerning the three testing axes and their interdependencies currently do not appear to be sufficiently solved.
6-Layer Model for a Structured Description and Categorization of Urban Traffic and Environment
Dec 09, 2020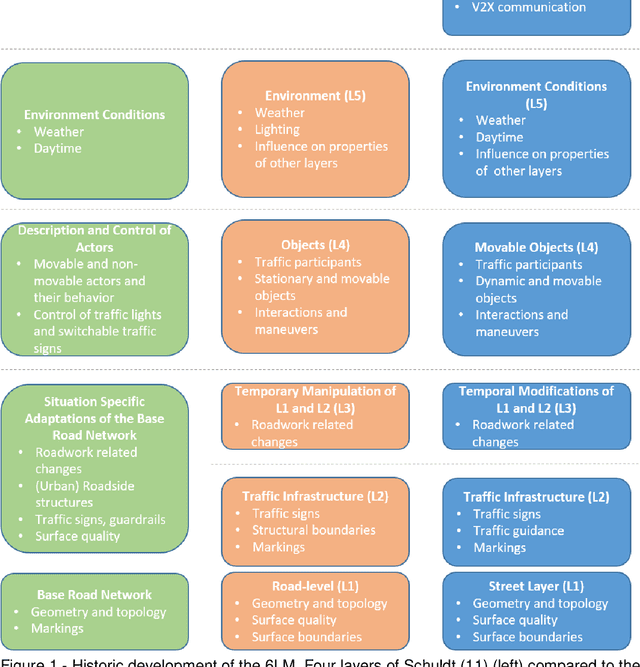
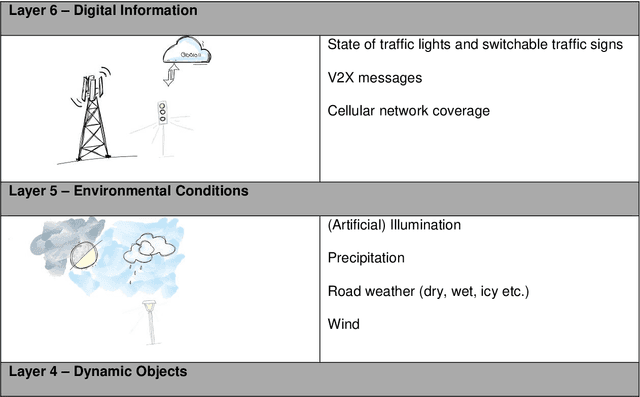
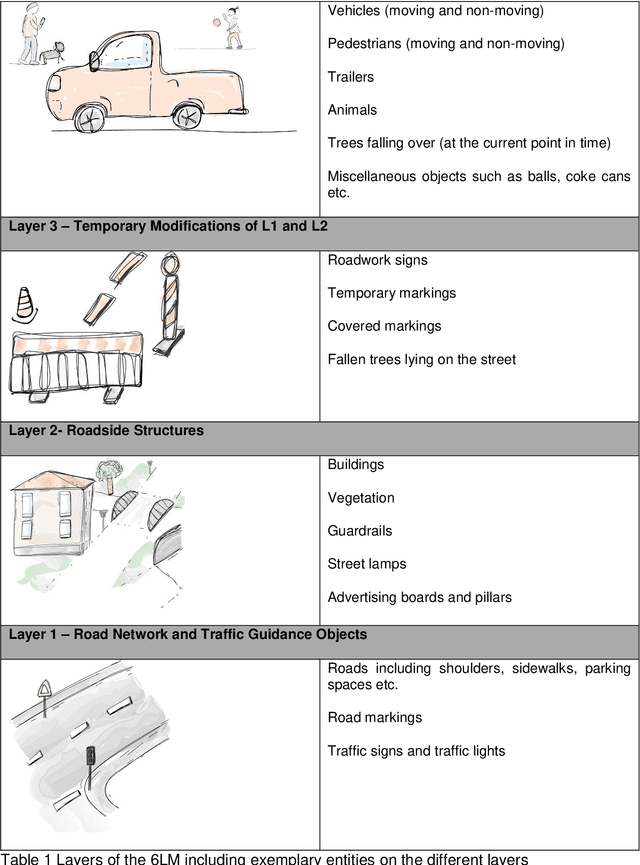
Verification and validation of automated driving functions impose large challenges. Currently, scenario-based approaches are investigated in research and industry, aiming at a reduction of testing efforts by specifying safety relevant scenarios. To define those scenarios and operate in a complex real-world design domain, a structured description of the environment is needed. Within the PEGASUS research project, the 6-Layer Model (6LM) was introduced for the description of highway scenarios. This paper refines the 6LM and extends it to urban traffic and environment. As defined in PEGASUS, the 6LM provides the possibility to categorize the environment and, therefore, functions as a structured basis for subsequent scenario description. The model enables a structured description and categorization of the general environment, without incorporating any knowledge or anticipating any functions of actors. Beyond that, there is a variety of other applications of the 6LM, which are elaborated in this paper. The 6LM includes a description of the road network and traffic guidance objects, roadside structures, temporary modifications of the former, dynamic objects, environmental conditions and digital information. The work at hand specifies each layer by categorizing its items. Guidelines are formulated and explanatory examples are given to standardize the application of the model for an objective environment description. In contrast to previous publications, the model and its design are described in far more detail. Finally, the holistic description of the 6LM presented includes remarks on possible future work when expanding the concept to machine perception aspects.