 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge6-Layer Model for a Structured Description and Categorization of Urban Traffic and Environment
Dec 09, 2020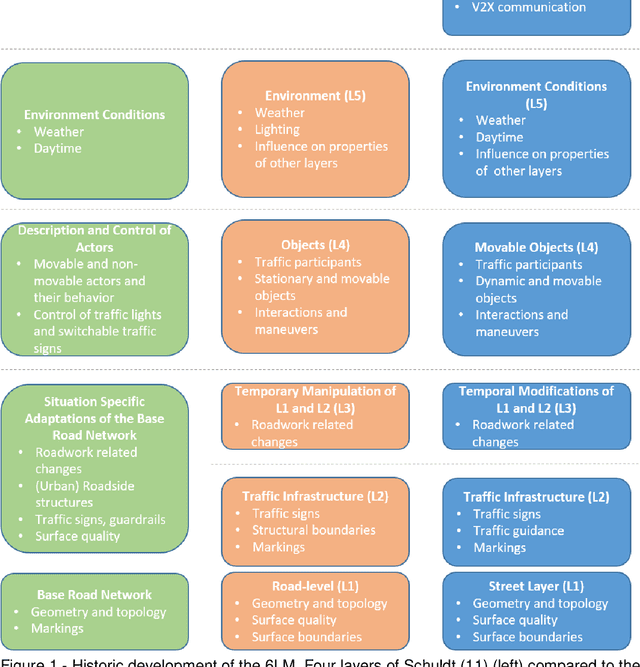
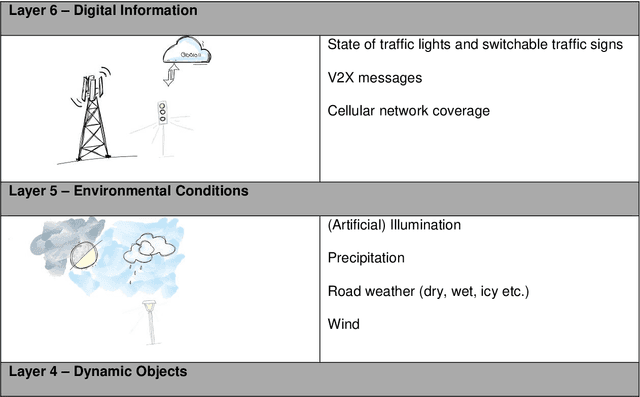
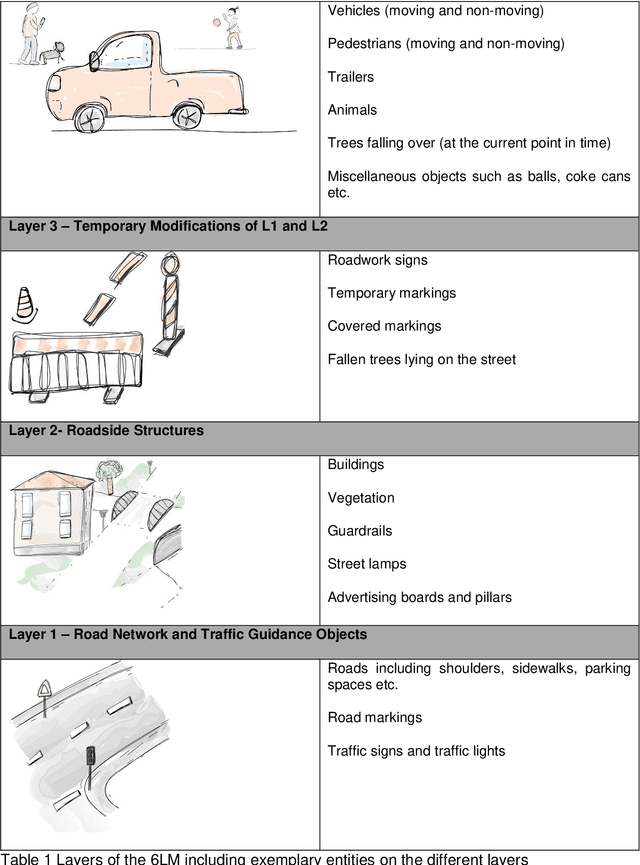
Verification and validation of automated driving functions impose large challenges. Currently, scenario-based approaches are investigated in research and industry, aiming at a reduction of testing efforts by specifying safety relevant scenarios. To define those scenarios and operate in a complex real-world design domain, a structured description of the environment is needed. Within the PEGASUS research project, the 6-Layer Model (6LM) was introduced for the description of highway scenarios. This paper refines the 6LM and extends it to urban traffic and environment. As defined in PEGASUS, the 6LM provides the possibility to categorize the environment and, therefore, functions as a structured basis for subsequent scenario description. The model enables a structured description and categorization of the general environment, without incorporating any knowledge or anticipating any functions of actors. Beyond that, there is a variety of other applications of the 6LM, which are elaborated in this paper. The 6LM includes a description of the road network and traffic guidance objects, roadside structures, temporary modifications of the former, dynamic objects, environmental conditions and digital information. The work at hand specifies each layer by categorizing its items. Guidelines are formulated and explanatory examples are given to standardize the application of the model for an objective environment description. In contrast to previous publications, the model and its design are described in far more detail. Finally, the holistic description of the 6LM presented includes remarks on possible future work when expanding the concept to machine perception aspects.