 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature Engineering with Regularity Structures
Aug 12, 2021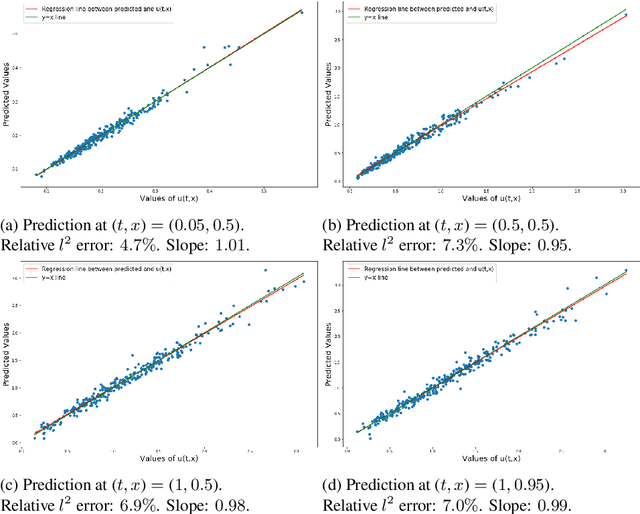
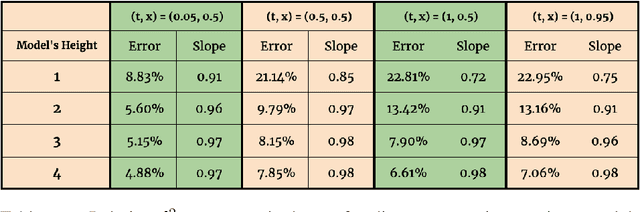
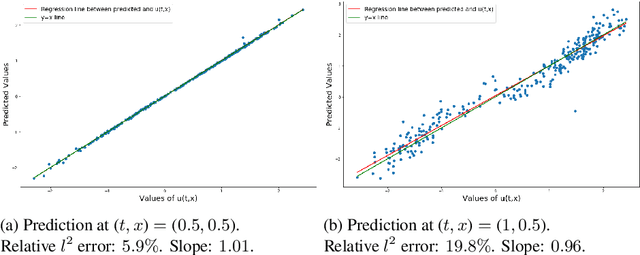

We investigate the use of models from the theory of regularity structure as features in machine learning tasks. A model is a multi-linear function of a space-time signal designed to well-approximate solutions to partial differential equations (PDEs), even in low regularity regimes. Models can be seen as natural multi-dimensional generalisations of signatures of paths; our work therefore aims to extend the recent use of signatures in data science beyond the context of time-ordered data. We provide a flexible definition of a model feature vector associated to a space-time signal, along with two algorithms which illustrate ways in which these features can be combined with linear regression. We apply these algorithms in several numerical experiments designed to learn solutions to PDEs with a given forcing and boundary data. Our experiments include semi-linear parabolic and wave equations with forcing, and Burgers' equation with no forcing. We find an advantage in favour of our algorithms when compared to several alternative methods. Additionally, in the experiment with Burgers' equation, we noticed stability in the prediction power when noise is added to the observations.
The ConScenD Dataset: Concrete Scenarios from the highD Dataset According to ALKS Regulation UNECE R157 in OpenX
Mar 17, 2021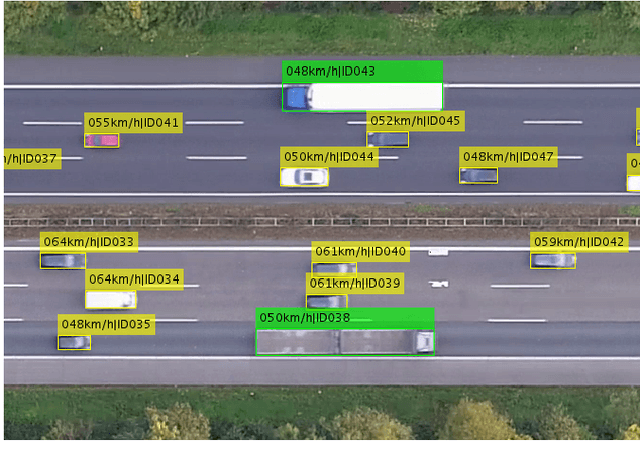
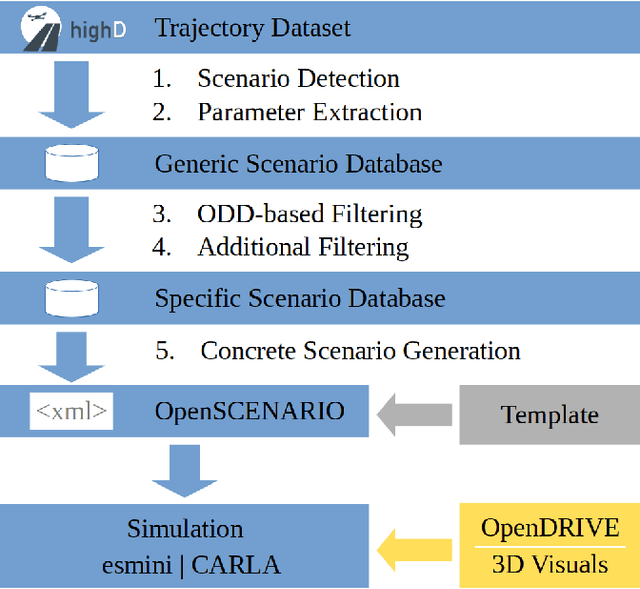
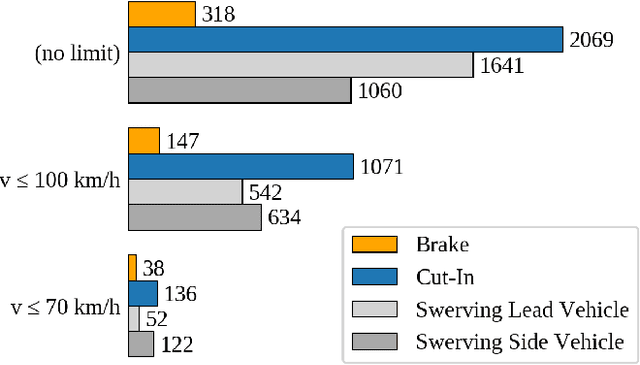
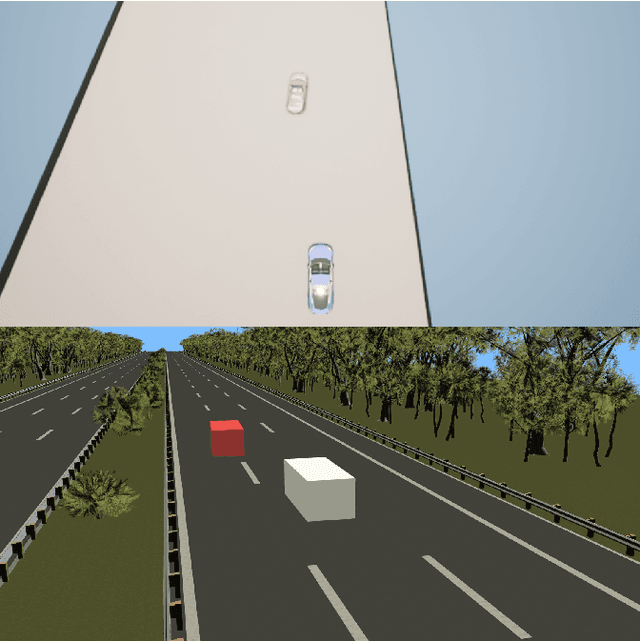
With Regulation UNECE R157 on Automated Lane-Keeping Systems, the first framework for the introduction of passenger cars with Level 3 systems has become available in 2020. In accordance with recent research projects including academia and the automotive industry, the Regulation utilizes scenario based testing for the safety assessment. The complexity of safety validation of automated driving systems necessitates system-level simulations. The Regulation, however, is missing the required parameterization necessary for test case generation. To overcome this problem, we incorporate the exposure and consider the heterogeneous behavior of the traffic participants by extracting concrete scenarios according to Regulation's scenario definition from the established naturalistic highway dataset highD. We present a methodology to find the scenarios in real-world data, extract the parameters for modeling the scenarios and transfer them to simulation. In this process, more than 340 scenarios were extracted. OpenSCENARIO files were generated to enable an exemplary transfer of the scenarios to CARLA and esmini. We compare the trajectories to examine the similarity of the scenarios in the simulation to the recorded scenarios. In order to foster research, we publish the resulting dataset called ConScenD together with instructions for usage with both simulation tools. The dataset is available online at https://www.levelXdata.com/scenarios.
6-Layer Model for a Structured Description and Categorization of Urban Traffic and Environment
Dec 09, 2020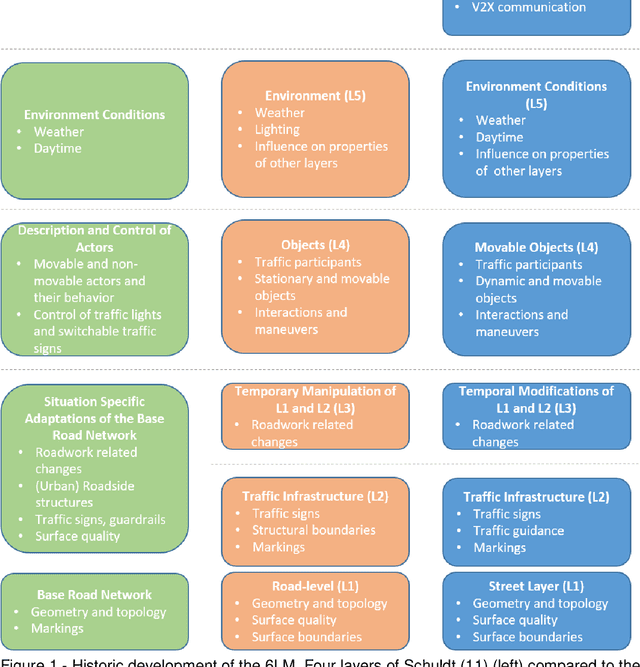
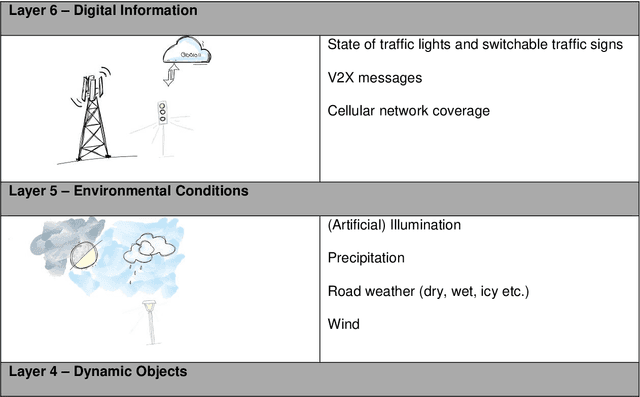
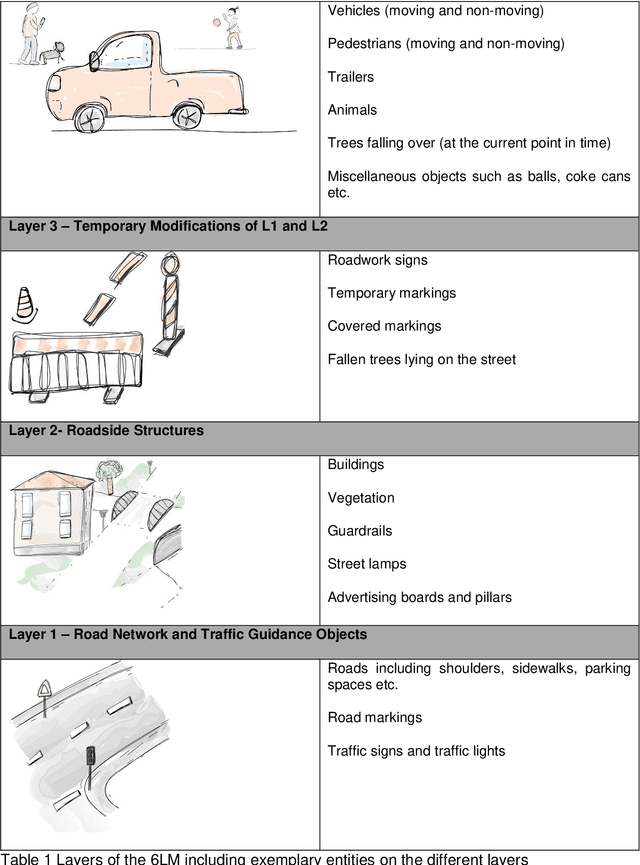
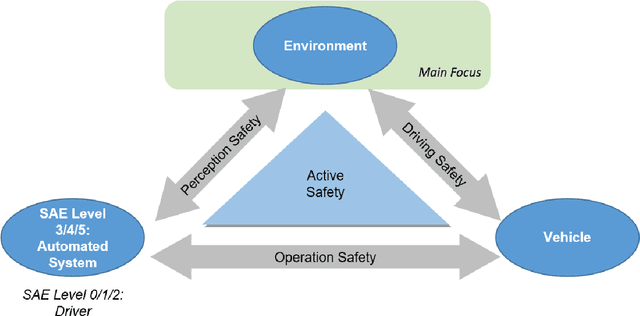
Verification and validation of automated driving functions impose large challenges. Currently, scenario-based approaches are investigated in research and industry, aiming at a reduction of testing efforts by specifying safety relevant scenarios. To define those scenarios and operate in a complex real-world design domain, a structured description of the environment is needed. Within the PEGASUS research project, the 6-Layer Model (6LM) was introduced for the description of highway scenarios. This paper refines the 6LM and extends it to urban traffic and environment. As defined in PEGASUS, the 6LM provides the possibility to categorize the environment and, therefore, functions as a structured basis for subsequent scenario description. The model enables a structured description and categorization of the general environment, without incorporating any knowledge or anticipating any functions of actors. Beyond that, there is a variety of other applications of the 6LM, which are elaborated in this paper. The 6LM includes a description of the road network and traffic guidance objects, roadside structures, temporary modifications of the former, dynamic objects, environmental conditions and digital information. The work at hand specifies each layer by categorizing its items. Guidelines are formulated and explanatory examples are given to standardize the application of the model for an objective environment description. In contrast to previous publications, the model and its design are described in far more detail. Finally, the holistic description of the 6LM presented includes remarks on possible future work when expanding the concept to machine perception aspects.