 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Learning-Based Framework for Collision-Free Motion Planning
Aug 10, 2025This paper presents a learning-based extension to a Circular Field (CF)-based motion planner for efficient, collision-free trajectory generation in cluttered environments. The proposed approach overcomes the limitations of hand-tuned force field parameters by employing a deep neural network trained to infer optimal planner gains from a single depth image of the scene. The pipeline incorporates a CUDA-accelerated perception module, a predictive agent-based planning strategy, and a dataset generated through Bayesian optimization in simulation. The resulting framework enables real-time planning without manual parameter tuning and is validated both in simulation and on a Franka Emika Panda robot. Experimental results demonstrate successful task completion and improved generalization compared to classical planners.
SharedAssembly: A Data Collection Approach via Shared Tele-Assembly
Mar 15, 2025Assembly is a fundamental skill for robots in both modern manufacturing and service robotics. Existing datasets aim to address the data bottleneck in training general-purpose robot models, falling short of capturing contact-rich assembly tasks. To bridge this gap, we introduce SharedAssembly, a novel bilateral teleoperation approach with shared autonomy for scalable assembly execution and data collection. User studies demonstrate that the proposed approach enhances both success rates and efficiency, achieving a 97.0% success rate across various sub-millimeter-level assembly tasks. Notably, novice and intermediate users achieve performance comparable to experts using baseline teleoperation methods, significantly enhancing large-scale data collection.
The ConScenD Dataset: Concrete Scenarios from the highD Dataset According to ALKS Regulation UNECE R157 in OpenX
Mar 17, 2021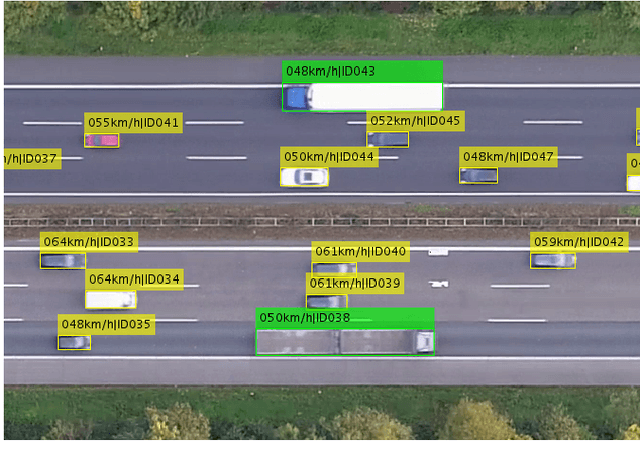
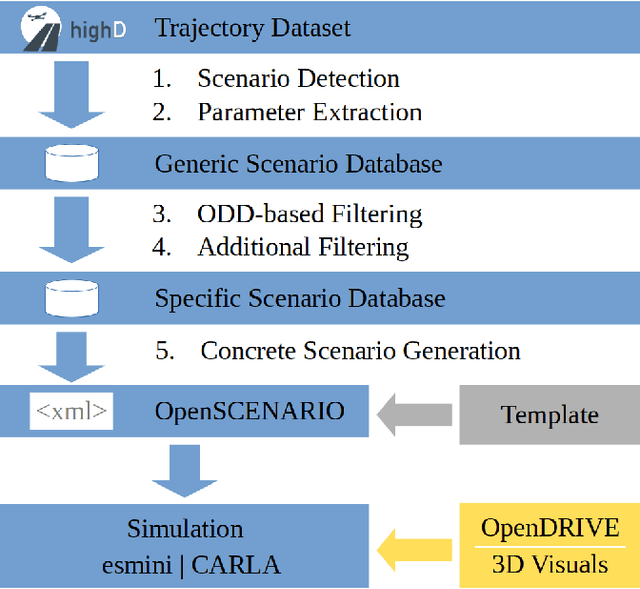
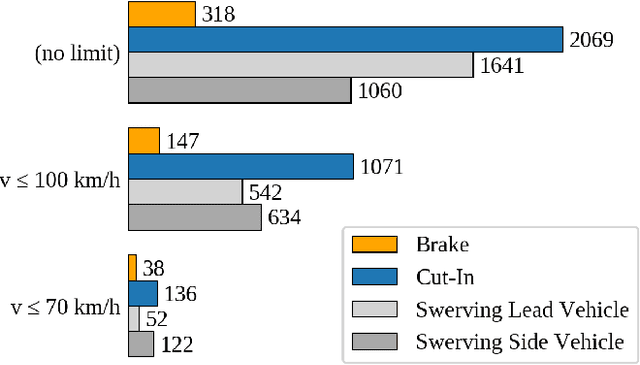
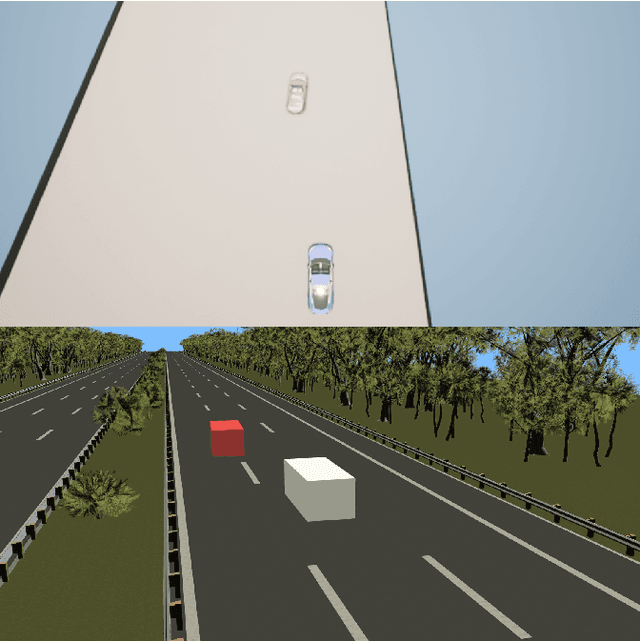
With Regulation UNECE R157 on Automated Lane-Keeping Systems, the first framework for the introduction of passenger cars with Level 3 systems has become available in 2020. In accordance with recent research projects including academia and the automotive industry, the Regulation utilizes scenario based testing for the safety assessment. The complexity of safety validation of automated driving systems necessitates system-level simulations. The Regulation, however, is missing the required parameterization necessary for test case generation. To overcome this problem, we incorporate the exposure and consider the heterogeneous behavior of the traffic participants by extracting concrete scenarios according to Regulation's scenario definition from the established naturalistic highway dataset highD. We present a methodology to find the scenarios in real-world data, extract the parameters for modeling the scenarios and transfer them to simulation. In this process, more than 340 scenarios were extracted. OpenSCENARIO files were generated to enable an exemplary transfer of the scenarios to CARLA and esmini. We compare the trajectories to examine the similarity of the scenarios in the simulation to the recorded scenarios. In order to foster research, we publish the resulting dataset called ConScenD together with instructions for usage with both simulation tools. The dataset is available online at https://www.levelXdata.com/scenarios.