 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHetroD: A High-Fidelity Drone Dataset and Benchmark for Autonomous Driving in Heterogeneous Traffic
Feb 03, 2026We present HetroD, a dataset and benchmark for developing autonomous driving systems in heterogeneous environments. HetroD targets the critical challenge of navi- gating real-world heterogeneous traffic dominated by vulner- able road users (VRUs), including pedestrians, cyclists, and motorcyclists that interact with vehicles. These mixed agent types exhibit complex behaviors such as hook turns, lane splitting, and informal right-of-way negotiation. Such behaviors pose significant challenges for autonomous vehicles but remain underrepresented in existing datasets focused on structured, lane-disciplined traffic. To bridge the gap, we collect a large- scale drone-based dataset to provide a holistic observation of traffic scenes with centimeter-accurate annotations, HD maps, and traffic signal states. We further develop a modular toolkit for extracting per-agent scenarios to support downstream task development. In total, the dataset comprises over 65.4k high- fidelity agent trajectories, 70% of which are from VRUs. HetroD supports modeling of VRU behaviors in dense, het- erogeneous traffic and provides standardized benchmarks for forecasting, planning, and simulation tasks. Evaluation results reveal that state-of-the-art prediction and planning models struggle with the challenges presented by our dataset: they fail to predict lateral VRU movements, cannot handle unstructured maneuvers, and exhibit limited performance in dense and multi-agent scenarios, highlighting the need for more robust approaches to heterogeneous traffic. See our project page for more examples: https://hetroddata.github.io/HetroD/
The ConScenD Dataset: Concrete Scenarios from the highD Dataset According to ALKS Regulation UNECE R157 in OpenX
Mar 17, 2021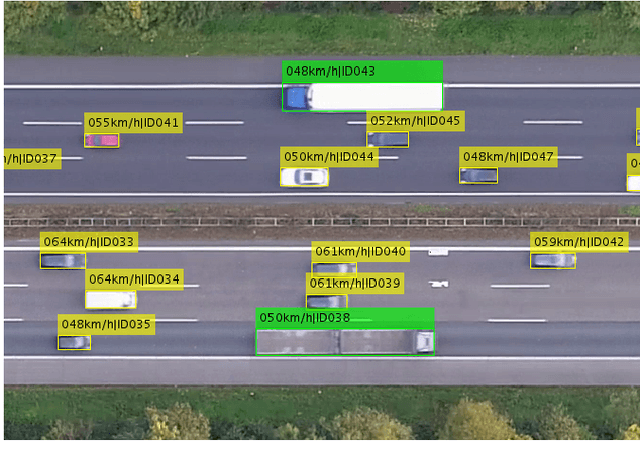
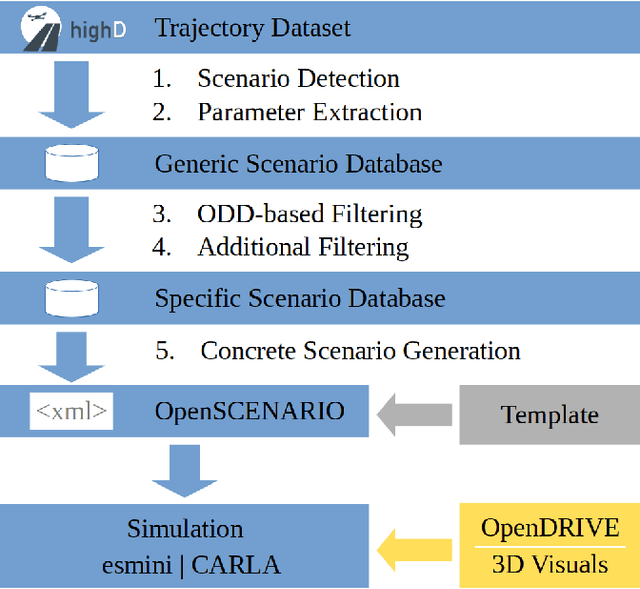
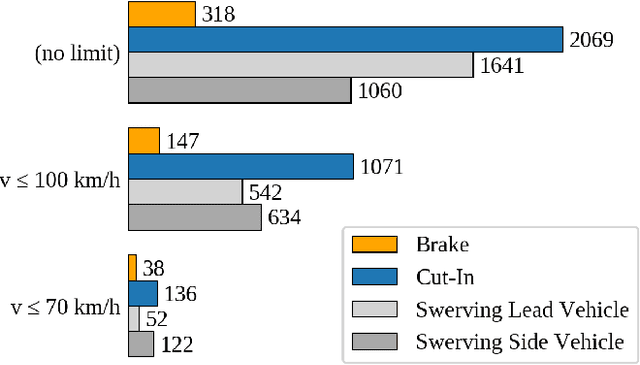
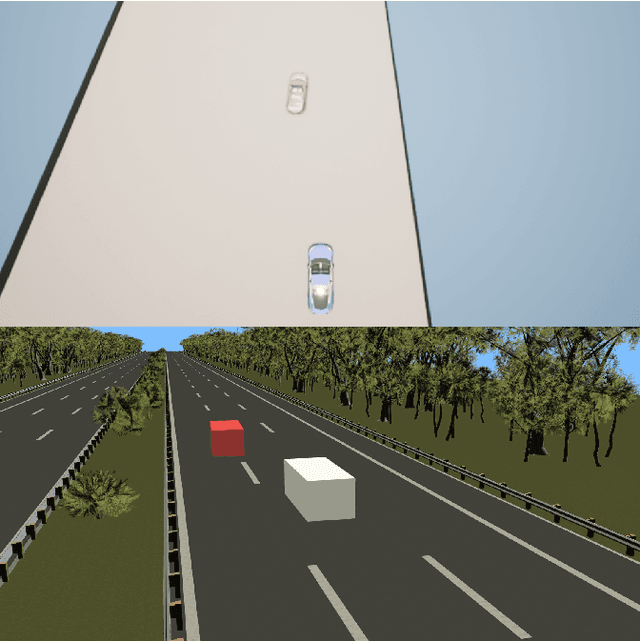
With Regulation UNECE R157 on Automated Lane-Keeping Systems, the first framework for the introduction of passenger cars with Level 3 systems has become available in 2020. In accordance with recent research projects including academia and the automotive industry, the Regulation utilizes scenario based testing for the safety assessment. The complexity of safety validation of automated driving systems necessitates system-level simulations. The Regulation, however, is missing the required parameterization necessary for test case generation. To overcome this problem, we incorporate the exposure and consider the heterogeneous behavior of the traffic participants by extracting concrete scenarios according to Regulation's scenario definition from the established naturalistic highway dataset highD. We present a methodology to find the scenarios in real-world data, extract the parameters for modeling the scenarios and transfer them to simulation. In this process, more than 340 scenarios were extracted. OpenSCENARIO files were generated to enable an exemplary transfer of the scenarios to CARLA and esmini. We compare the trajectories to examine the similarity of the scenarios in the simulation to the recorded scenarios. In order to foster research, we publish the resulting dataset called ConScenD together with instructions for usage with both simulation tools. The dataset is available online at https://www.levelXdata.com/scenarios.