 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Drive is a Free Gift: Large-Scale Label-Free Autonomy Pretraining from Unposed In-The-Wild Videos
Feb 25, 2026Ego-centric driving videos available online provide an abundant source of visual data for autonomous driving, yet their lack of annotations makes it difficult to learn representations that capture both semantic structure and 3D geometry. Recent advances in large feedforward spatial models demonstrate that point maps and ego-motion can be inferred in a single forward pass, suggesting a promising direction for scalable driving perception. We therefore propose a label-free, teacher-guided framework for learning autonomous driving representations directly from unposed videos. Unlike prior self-supervised approaches that focus primarily on frame-to-frame consistency, we posit that safe and reactive driving depends critically on temporal context. To this end, we leverage a feedforward architecture equipped with a lightweight autoregressive module, trained using multi-modal supervisory signals that guide the model to jointly predict current and future point maps, camera poses, semantic segmentation, and motion masks. Multi-modal teachers provide sequence-level pseudo-supervision, enabling LFG to learn a unified pseudo-4D representation from raw YouTube videos without poses, labels, or LiDAR. The resulting encoder not only transfers effectively to downstream autonomous driving planning on the NAVSIM benchmark, surpassing multi-camera and LiDAR baselines with only a single monocular camera, but also yields strong performance when evaluated on a range of semantic, geometric, and qualitative motion prediction tasks. These geometry and motion-aware features position LFG as a compelling video-centric foundation model for autonomous driving.
HetroD: A High-Fidelity Drone Dataset and Benchmark for Autonomous Driving in Heterogeneous Traffic
Feb 03, 2026We present HetroD, a dataset and benchmark for developing autonomous driving systems in heterogeneous environments. HetroD targets the critical challenge of navi- gating real-world heterogeneous traffic dominated by vulner- able road users (VRUs), including pedestrians, cyclists, and motorcyclists that interact with vehicles. These mixed agent types exhibit complex behaviors such as hook turns, lane splitting, and informal right-of-way negotiation. Such behaviors pose significant challenges for autonomous vehicles but remain underrepresented in existing datasets focused on structured, lane-disciplined traffic. To bridge the gap, we collect a large- scale drone-based dataset to provide a holistic observation of traffic scenes with centimeter-accurate annotations, HD maps, and traffic signal states. We further develop a modular toolkit for extracting per-agent scenarios to support downstream task development. In total, the dataset comprises over 65.4k high- fidelity agent trajectories, 70% of which are from VRUs. HetroD supports modeling of VRU behaviors in dense, het- erogeneous traffic and provides standardized benchmarks for forecasting, planning, and simulation tasks. Evaluation results reveal that state-of-the-art prediction and planning models struggle with the challenges presented by our dataset: they fail to predict lateral VRU movements, cannot handle unstructured maneuvers, and exhibit limited performance in dense and multi-agent scenarios, highlighting the need for more robust approaches to heterogeneous traffic. See our project page for more examples: https://hetroddata.github.io/HetroD/
LANGTRAJ: Diffusion Model and Dataset for Language-Conditioned Trajectory Simulation
Apr 15, 2025



Evaluating autonomous vehicles with controllability enables scalable testing in counterfactual or structured settings, enhancing both efficiency and safety. We introduce LangTraj, a language-conditioned scene-diffusion model that simulates the joint behavior of all agents in traffic scenarios. By conditioning on natural language inputs, LangTraj provides flexible and intuitive control over interactive behaviors, generating nuanced and realistic scenarios. Unlike prior approaches that depend on domain-specific guidance functions, LangTraj incorporates language conditioning during training, facilitating more intuitive traffic simulation control. We propose a novel closed-loop training strategy for diffusion models, explicitly tailored to enhance stability and realism during closed-loop simulation. To support language-conditioned simulation, we develop Inter-Drive, a large-scale dataset with diverse and interactive labels for training language-conditioned diffusion models. Our dataset is built upon a scalable pipeline for annotating agent-agent interactions and single-agent behaviors, ensuring rich and varied supervision. Validated on the Waymo Motion Dataset, LangTraj demonstrates strong performance in realism, language controllability, and language-conditioned safety-critical simulation, establishing a new paradigm for flexible and scalable autonomous vehicle testing.
Controllable Safety-Critical Closed-loop Traffic Simulation via Guided Diffusion
Dec 31, 2023Evaluating the performance of autonomous vehicle planning algorithms necessitates simulating long-tail traffic scenarios. Traditional methods for generating safety-critical scenarios often fall short in realism and controllability. Furthermore, these techniques generally neglect the dynamics of agent interactions. To mitigate these limitations, we introduce a novel closed-loop simulation framework rooted in guided diffusion models. Our approach yields two distinct advantages: 1) the generation of realistic long-tail scenarios that closely emulate real-world conditions, and 2) enhanced controllability, enabling more comprehensive and interactive evaluations. We achieve this through novel guidance objectives that enhance road progress while lowering collision and off-road rates. We develop a novel approach to simulate safety-critical scenarios through an adversarial term in the denoising process, which allows the adversarial agent to challenge a planner with plausible maneuvers, while all agents in the scene exhibit reactive and realistic behaviors. We validate our framework empirically using the NuScenes dataset, demonstrating improvements in both realism and controllability. These findings affirm that guided diffusion models provide a robust and versatile foundation for safety-critical, interactive traffic simulation, extending their utility across the broader landscape of autonomous driving. For additional resources and demonstrations, visit our project page at https://safe-sim.github.io.
Editing Driver Character: Socially-Controllable Behavior Generation for Interactive Traffic Simulation
Mar 24, 2023Traffic simulation plays a crucial role in evaluating and improving autonomous driving planning systems. After being deployed on public roads, autonomous vehicles need to interact with human road participants with different social preferences (e.g., selfish or courteous human drivers). To ensure that autonomous vehicles take safe and efficient maneuvers in different interactive traffic scenarios, we should be able to evaluate autonomous vehicles against reactive agents with different social characteristics in the simulation environment. We propose a socially-controllable behavior generation (SCBG) model for this purpose, which allows the users to specify the level of courtesy of the generated trajectory while ensuring realistic and human-like trajectory generation through learning from real-world driving data. Specifically, we define a novel and differentiable measure to quantify the level of courtesy of driving behavior, leveraging marginal and conditional behavior prediction models trained from real-world driving data. The proposed courtesy measure allows us to auto-label the courtesy levels of trajectories from real-world driving data and conveniently train an SCBG model generating trajectories based on the input courtesy values. We examined the SCBG model on the Waymo Open Motion Dataset (WOMD) and showed that we were able to control the SCBG model to generate realistic driving behaviors with desired courtesy levels. Interestingly, we found that the SCBG model was able to identify different motion patterns of courteous behaviors according to the scenarios.
Analyzing and Enhancing Closed-loop Stability in Reactive Simulation
Aug 09, 2022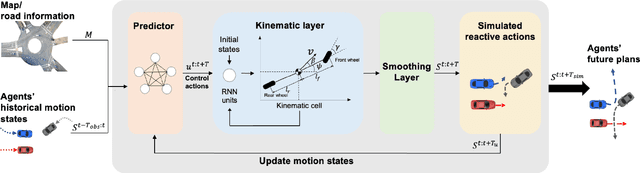
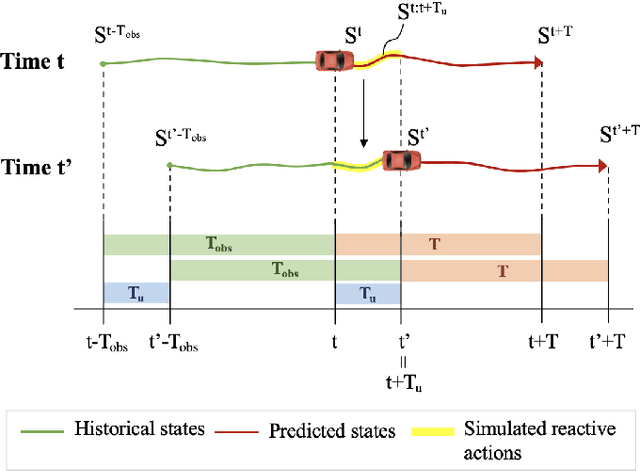
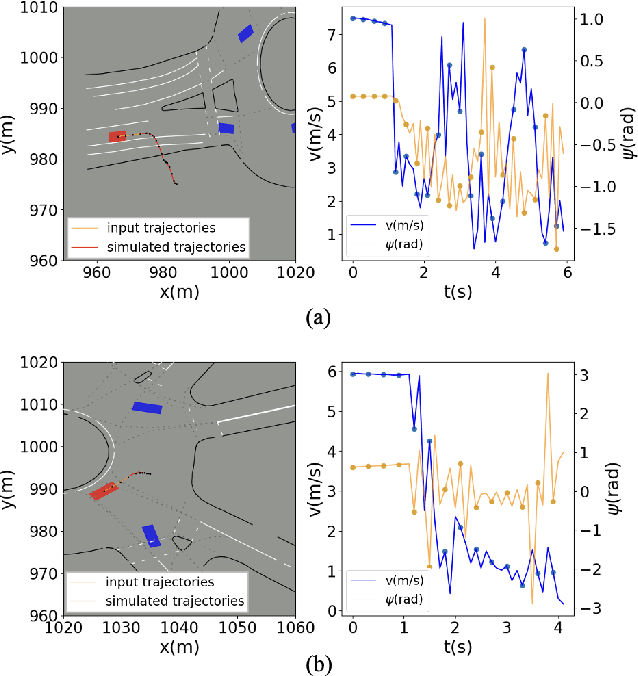
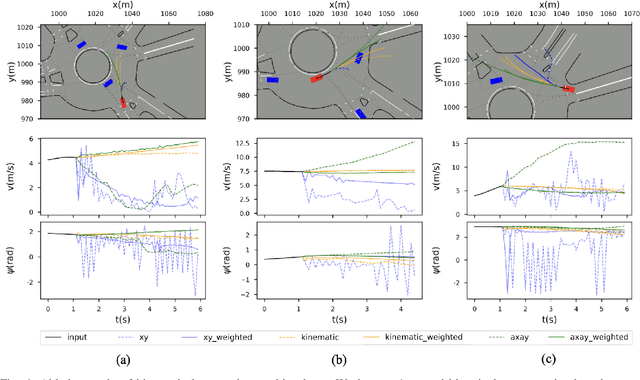
Simulation has played an important role in efficiently evaluating self-driving vehicles in terms of scalability. Existing methods mostly rely on heuristic-based simulation, where traffic participants follow certain human-encoded rules that fail to generate complex human behaviors. Therefore, the reactive simulation concept is proposed to bridge the human behavior gap between simulation and real-world traffic scenarios by leveraging real-world data. However, these reactive models can easily generate unreasonable behaviors after a few steps of simulation, where we regard the model as losing its stability. To the best of our knowledge, no work has explicitly discussed and analyzed the stability of the reactive simulation framework. In this paper, we aim to provide a thorough stability analysis of the reactive simulation and propose a solution to enhance the stability. Specifically, we first propose a new reactive simulation framework, where we discover that the smoothness and consistency of the simulated state sequences are crucial factors to stability. We then incorporate the kinematic vehicle model into the framework to improve the closed-loop stability of the reactive simulation. Furthermore, along with commonly-used metrics, several novel metrics are proposed in this paper to better analyze the simulation performance.