 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe ConScenD Dataset: Concrete Scenarios from the highD Dataset According to ALKS Regulation UNECE R157 in OpenX
Mar 17, 2021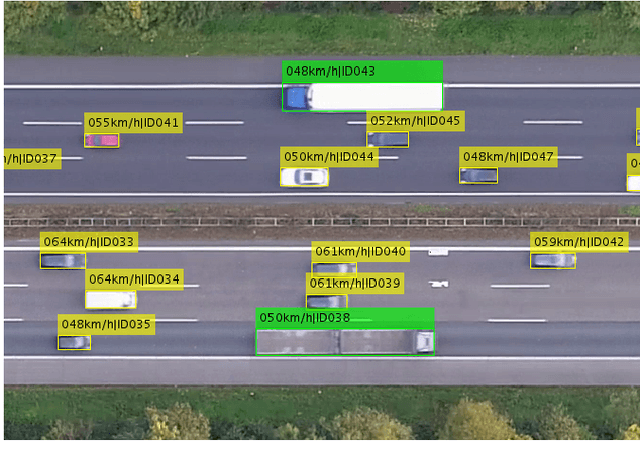
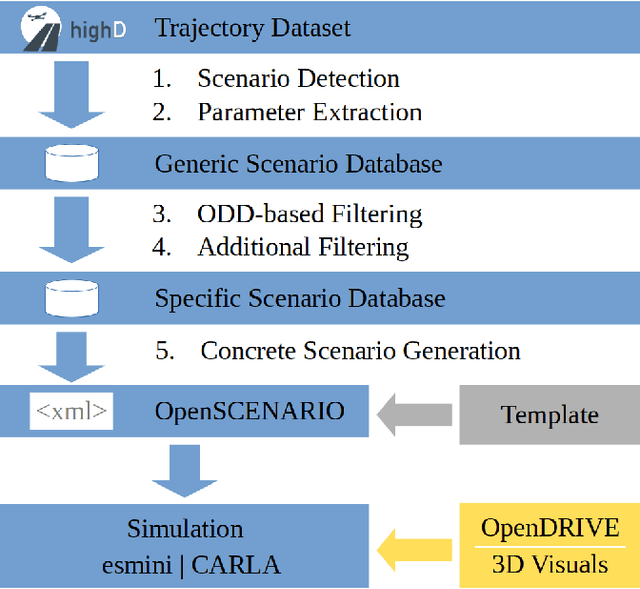
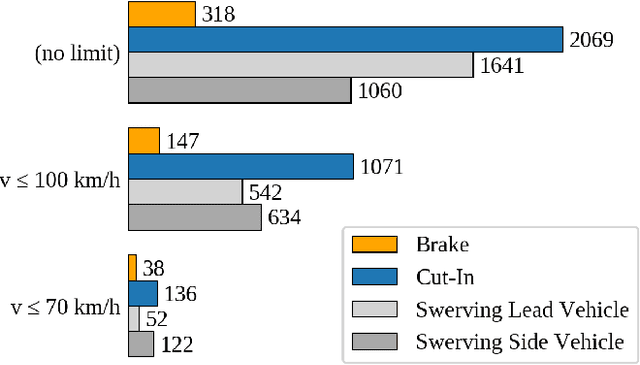
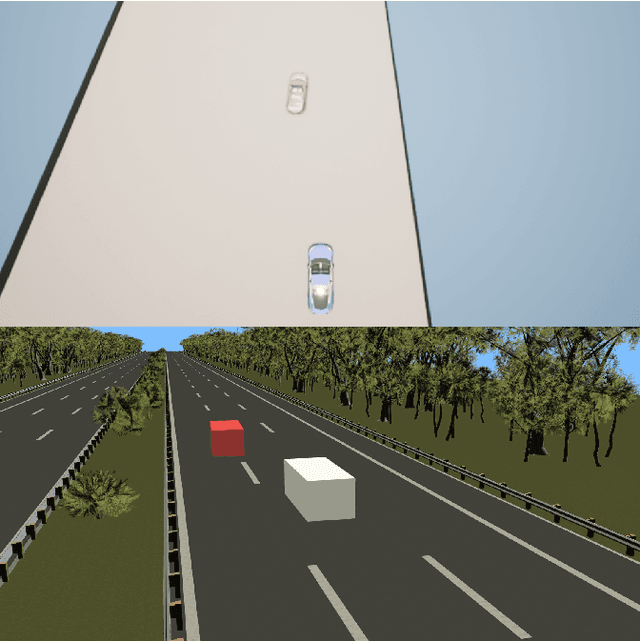
With Regulation UNECE R157 on Automated Lane-Keeping Systems, the first framework for the introduction of passenger cars with Level 3 systems has become available in 2020. In accordance with recent research projects including academia and the automotive industry, the Regulation utilizes scenario based testing for the safety assessment. The complexity of safety validation of automated driving systems necessitates system-level simulations. The Regulation, however, is missing the required parameterization necessary for test case generation. To overcome this problem, we incorporate the exposure and consider the heterogeneous behavior of the traffic participants by extracting concrete scenarios according to Regulation's scenario definition from the established naturalistic highway dataset highD. We present a methodology to find the scenarios in real-world data, extract the parameters for modeling the scenarios and transfer them to simulation. In this process, more than 340 scenarios were extracted. OpenSCENARIO files were generated to enable an exemplary transfer of the scenarios to CARLA and esmini. We compare the trajectories to examine the similarity of the scenarios in the simulation to the recorded scenarios. In order to foster research, we publish the resulting dataset called ConScenD together with instructions for usage with both simulation tools. The dataset is available online at https://www.levelXdata.com/scenarios.
6-Layer Model for a Structured Description and Categorization of Urban Traffic and Environment
Dec 09, 2020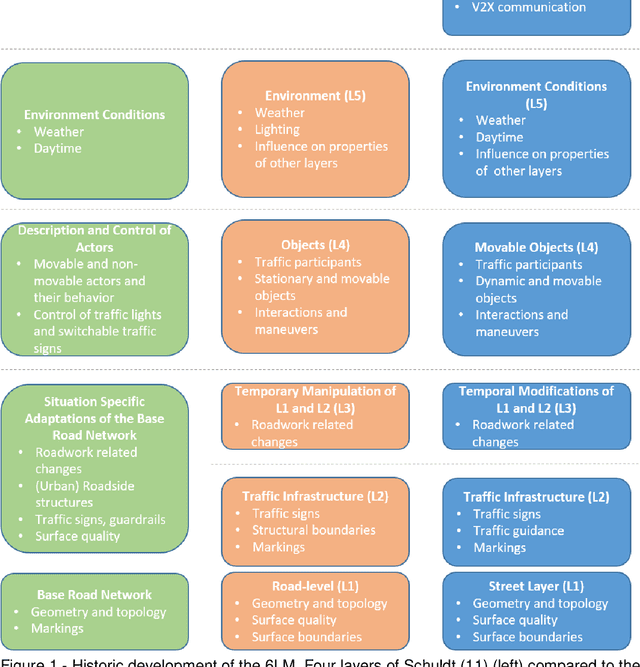
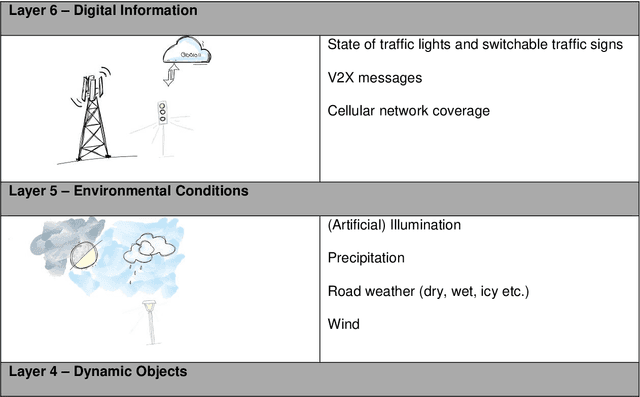
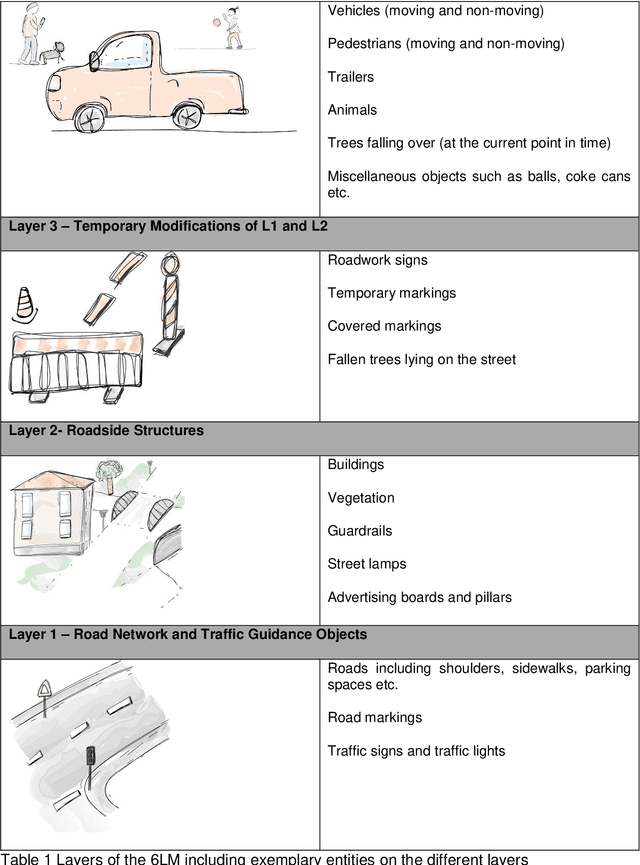
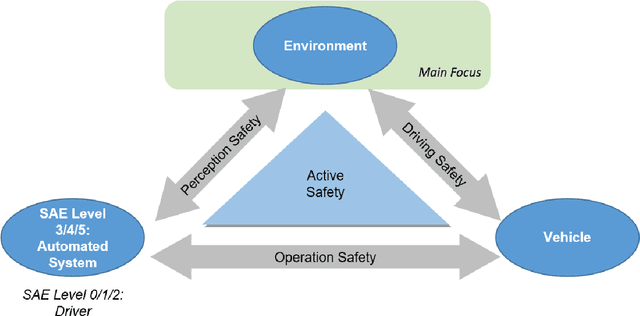
Verification and validation of automated driving functions impose large challenges. Currently, scenario-based approaches are investigated in research and industry, aiming at a reduction of testing efforts by specifying safety relevant scenarios. To define those scenarios and operate in a complex real-world design domain, a structured description of the environment is needed. Within the PEGASUS research project, the 6-Layer Model (6LM) was introduced for the description of highway scenarios. This paper refines the 6LM and extends it to urban traffic and environment. As defined in PEGASUS, the 6LM provides the possibility to categorize the environment and, therefore, functions as a structured basis for subsequent scenario description. The model enables a structured description and categorization of the general environment, without incorporating any knowledge or anticipating any functions of actors. Beyond that, there is a variety of other applications of the 6LM, which are elaborated in this paper. The 6LM includes a description of the road network and traffic guidance objects, roadside structures, temporary modifications of the former, dynamic objects, environmental conditions and digital information. The work at hand specifies each layer by categorizing its items. Guidelines are formulated and explanatory examples are given to standardize the application of the model for an objective environment description. In contrast to previous publications, the model and its design are described in far more detail. Finally, the holistic description of the 6LM presented includes remarks on possible future work when expanding the concept to machine perception aspects.
The inD Dataset: A Drone Dataset of Naturalistic Road User Trajectories at German Intersections
Nov 18, 2019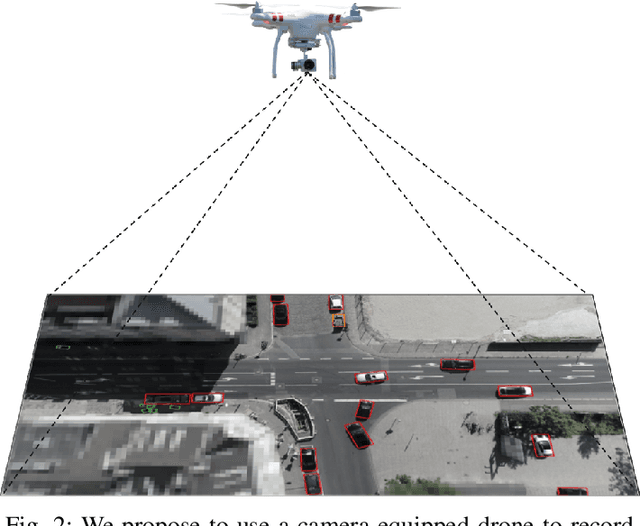
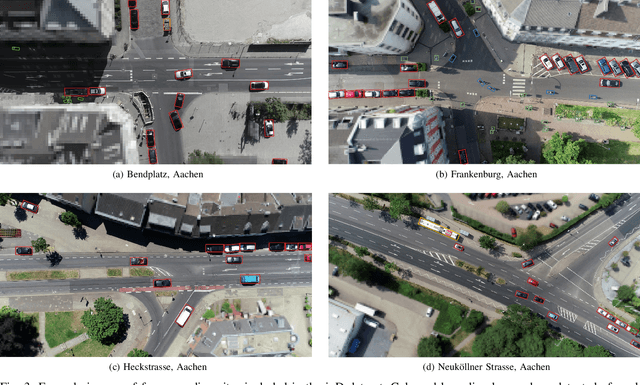
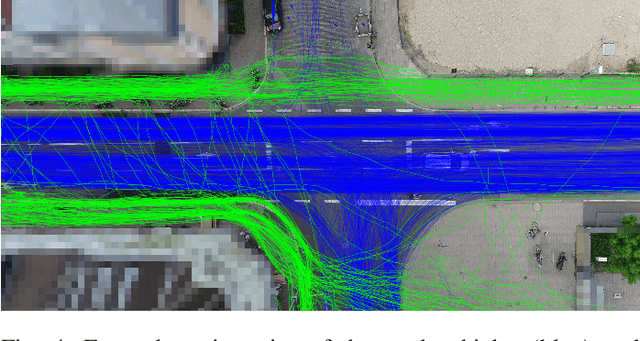
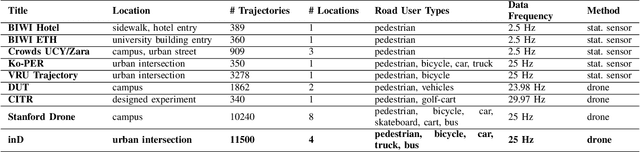
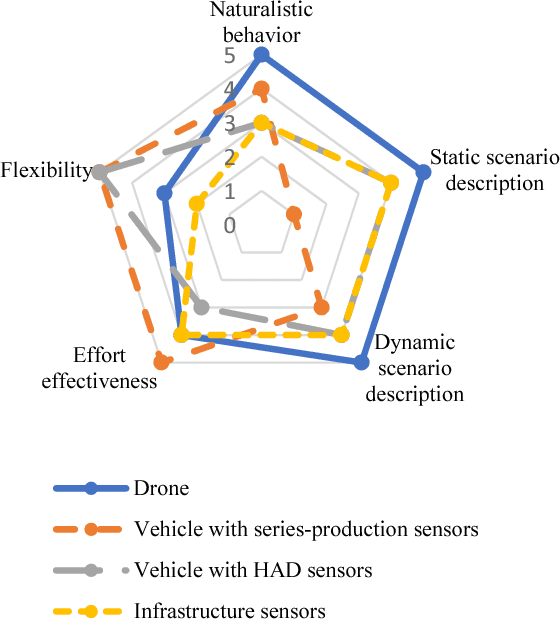
Automated vehicles rely heavily on data-driven methods, especially for complex urban environments. Large datasets of real world measurement data in the form of road user trajectories are crucial for several tasks like road user prediction models or scenario-based safety validation. So far, though, this demand is unmet as no public dataset of urban road user trajectories is available in an appropriate size, quality and variety. By contrast, the highway drone dataset (highD) has recently shown that drones are an efficient method for acquiring naturalistic road user trajectories. Compared to driving studies or ground-level infrastructure sensors, one major advantage of using a drone is the possibility to record naturalistic behavior, as road users do not notice measurements taking place. Due to the ideal viewing angle, an entire intersection scenario can be measured with significantly less occlusion than with sensors at ground level. Both the class and the trajectory of each road user can be extracted from the video recordings with high precision using state-of-the-art deep neural networks. Therefore, we propose the creation of a comprehensive, large-scale urban intersection dataset with naturalistic road user behavior using camera-equipped drones as successor of the highD dataset. The resulting dataset contains more than 11500 road users including vehicles, bicyclists and pedestrians at intersections in Germany and is called inD. The dataset consists of 10 hours of measurement data from four intersections and is available online for non-commercial research at: http://www.inD-dataset.com
The highD Dataset: A Drone Dataset of Naturalistic Vehicle Trajectories on German Highways for Validation of Highly Automated Driving Systems
Oct 11, 2018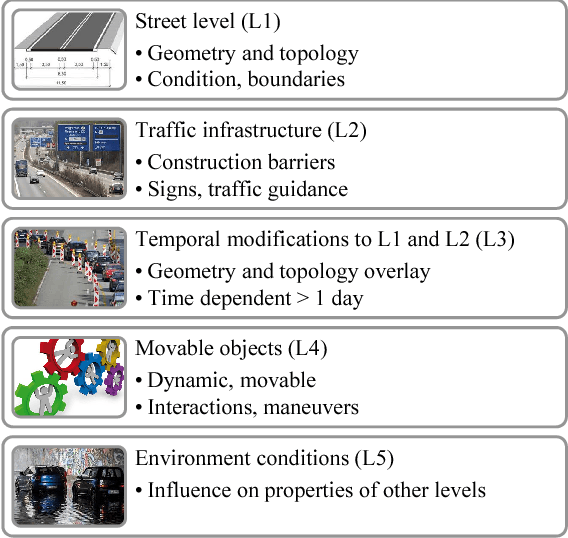
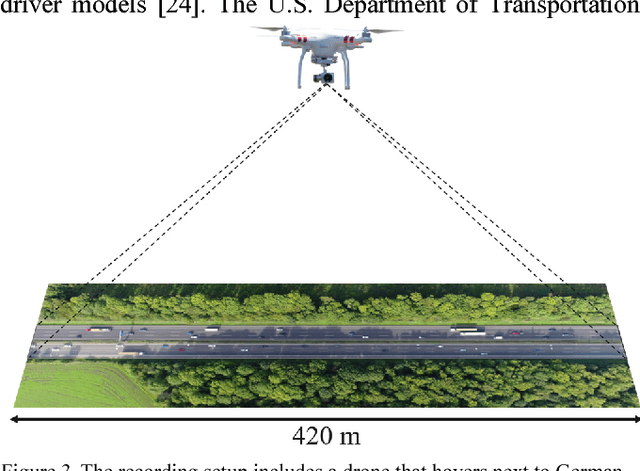
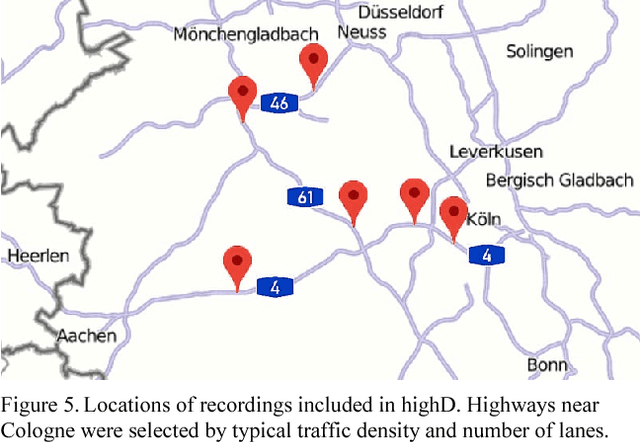
Scenario-based testing for the safety validation of highly automated vehicles is a promising approach that is being examined in research and industry. This approach heavily relies on data from real-world scenarios to derive the necessary scenario information for testing. Measurement data should be collected at a reasonable effort, contain naturalistic behavior of road users and include all data relevant for a description of the identified scenarios in sufficient quality. However, the current measurement methods fail to meet at least one of the requirements. Thus, we propose a novel method to measure data from an aerial perspective for scenario-based validation fulfilling the mentioned requirements. Furthermore, we provide a large-scale naturalistic vehicle trajectory dataset from German highways called highD. We evaluate the data in terms of quantity, variety and contained scenarios. Our dataset consists of 16.5 hours of measurements from six locations with 110 000 vehicles, a total driven distance of 45 000 km and 5600 recorded complete lane changes. The highD dataset is available online at: http://www.highD-dataset.com