 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetermining the Tactical Challenge of Scenarios to Efficiently Test Automated Driving Systems
Apr 03, 2024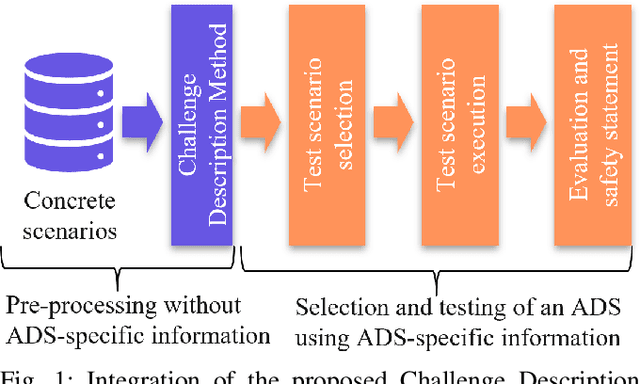



The selection of relevant test scenarios for the scenario-based testing and safety validation of automated driving systems (ADSs) remains challenging. An important aspect of the relevance of a scenario is the challenge it poses for an ADS. Existing methods for calculating the challenge of a scenario aim to express the challenge in terms of a metric value. Metric values are useful to select the least or most challenging scenario. However, they fail to provide human-interpretable information on the cause of the challenge which is critical information for the efficient selection of relevant test scenarios. Therefore, this paper presents the Challenge Description Method that mitigates this issue by analyzing scenarios and providing a description of their challenge in terms of the minimum required lane changes and their difficulty. Applying the method to different highway scenarios showed that it is capable of analyzing complex scenarios and providing easy-to-understand descriptions that can be used to select relevant test scenarios.
The inD Dataset: A Drone Dataset of Naturalistic Road User Trajectories at German Intersections
Nov 18, 2019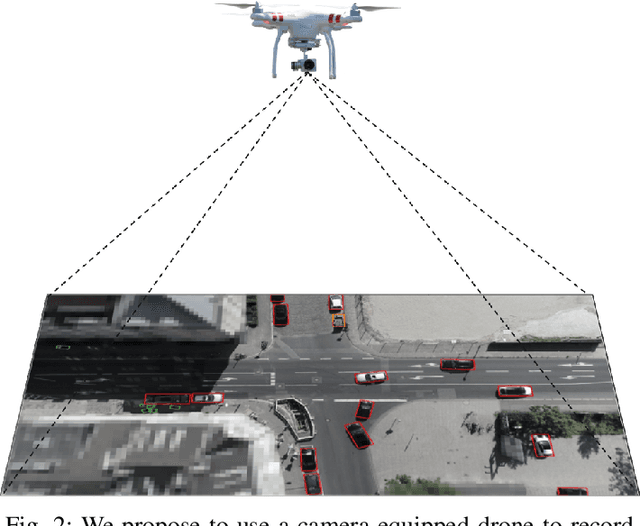
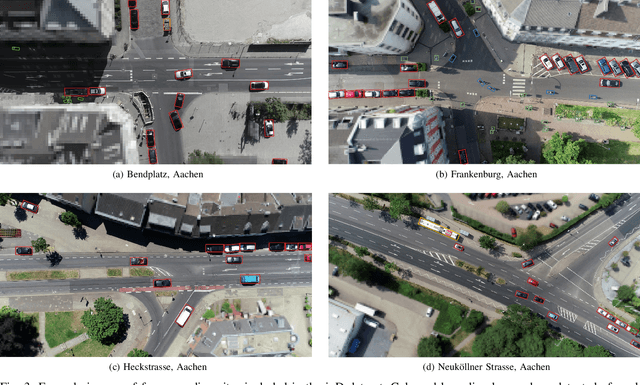
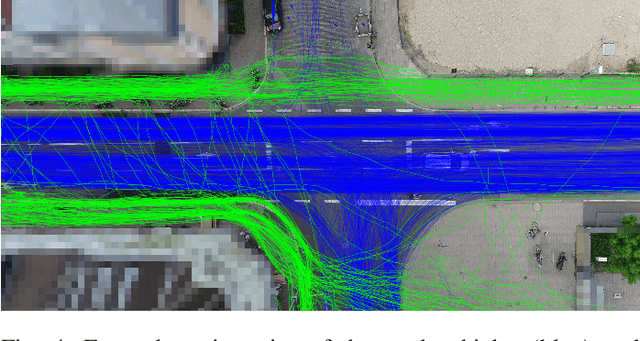
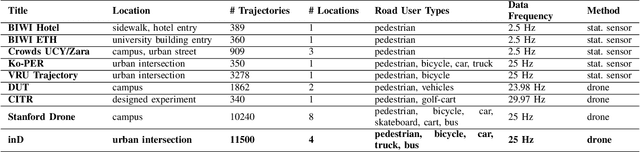
Automated vehicles rely heavily on data-driven methods, especially for complex urban environments. Large datasets of real world measurement data in the form of road user trajectories are crucial for several tasks like road user prediction models or scenario-based safety validation. So far, though, this demand is unmet as no public dataset of urban road user trajectories is available in an appropriate size, quality and variety. By contrast, the highway drone dataset (highD) has recently shown that drones are an efficient method for acquiring naturalistic road user trajectories. Compared to driving studies or ground-level infrastructure sensors, one major advantage of using a drone is the possibility to record naturalistic behavior, as road users do not notice measurements taking place. Due to the ideal viewing angle, an entire intersection scenario can be measured with significantly less occlusion than with sensors at ground level. Both the class and the trajectory of each road user can be extracted from the video recordings with high precision using state-of-the-art deep neural networks. Therefore, we propose the creation of a comprehensive, large-scale urban intersection dataset with naturalistic road user behavior using camera-equipped drones as successor of the highD dataset. The resulting dataset contains more than 11500 road users including vehicles, bicyclists and pedestrians at intersections in Germany and is called inD. The dataset consists of 10 hours of measurement data from four intersections and is available online for non-commercial research at: http://www.inD-dataset.com