 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe highD Dataset: A Drone Dataset of Naturalistic Vehicle Trajectories on German Highways for Validation of Highly Automated Driving Systems
Paper and Code
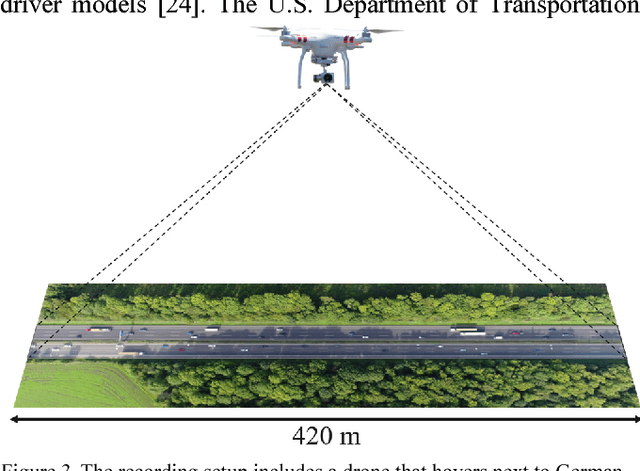
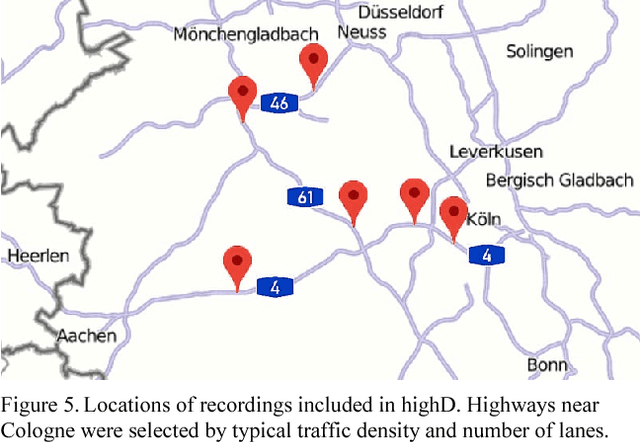
Scenario-based testing for the safety validation of highly automated vehicles is a promising approach that is being examined in research and industry. This approach heavily relies on data from real-world scenarios to derive the necessary scenario information for testing. Measurement data should be collected at a reasonable effort, contain naturalistic behavior of road users and include all data relevant for a description of the identified scenarios in sufficient quality. However, the current measurement methods fail to meet at least one of the requirements. Thus, we propose a novel method to measure data from an aerial perspective for scenario-based validation fulfilling the mentioned requirements. Furthermore, we provide a large-scale naturalistic vehicle trajectory dataset from German highways called highD. We evaluate the data in terms of quantity, variety and contained scenarios. Our dataset consists of 16.5 hours of measurements from six locations with 110 000 vehicles, a total driven distance of 45 000 km and 5600 recorded complete lane changes. The highD dataset is available online at: http://www.highD-dataset.com