 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChecklist to Transparently Define Test Oracles for TP, FP, and FN Objects in Automated Driving
Aug 14, 2023Popular test oracles for the perception subsystem of driving automation systems identify true-positive (TP), false-positive (FP), and false-negative (FN) objects. Oracle transparency is needed for comparing test results and for safety cases. To date, there exists a common notion of TPs, FPs, and FNs in the field, but apparently no published way to comprehensively define their oracles. Therefore, this paper provides a checklist of functional aspects and implementation details that affect the oracle behavior. Besides labeling policies of the test set, we cover fields of view, occlusion handling, safety-relevant areas, matching criteria, temporal and probabilistic issues, and further aspects. Even though our checklist can hardly be formalized, it can help practitioners maximize the transparency of their oracles, which, in turn, makes statements on object perception more reliable and comparable.
A Review of Testing Object-Based Environment Perception for Safe Automated Driving
Feb 16, 2021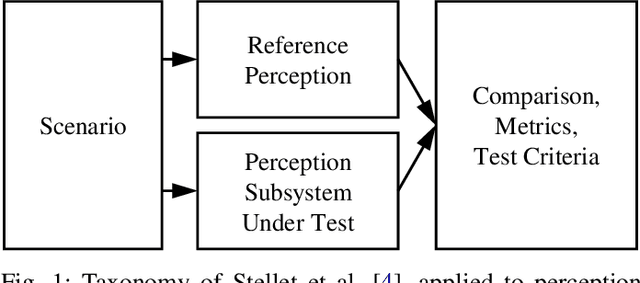
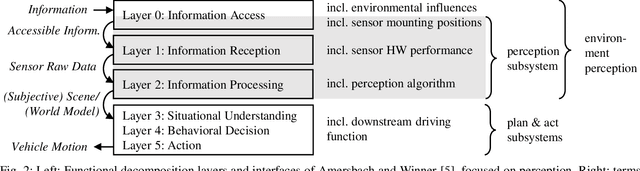
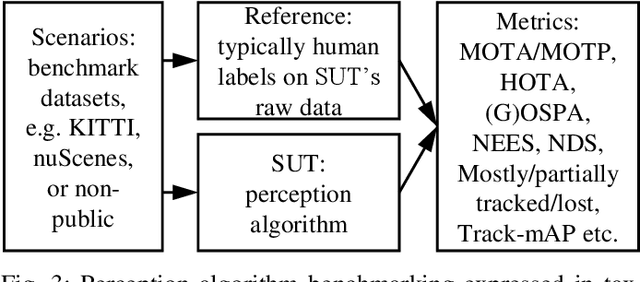
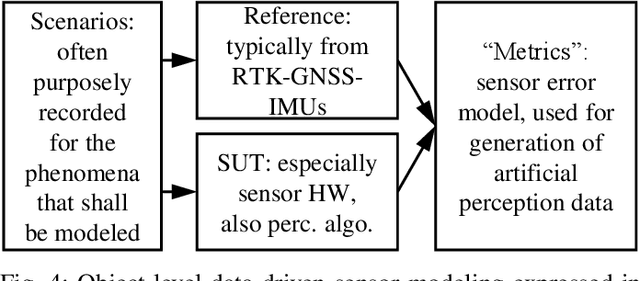
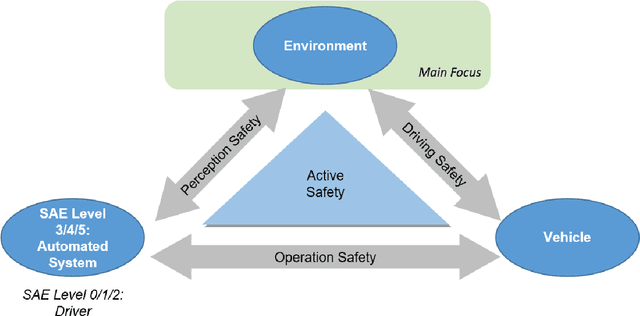
Safety assurance of automated driving systems must consider uncertain environment perception. This paper reviews literature addressing how perception testing is realized as part of safety assurance. We focus on testing for verification and validation purposes at the interface between perception and planning, and structure our analysis along the three axes 1) test criteria and metrics, 2) test scenarios, and 3) reference data. Furthermore, the analyzed literature includes related safety standards, safety-independent perception algorithm benchmarking, and sensor modeling. We find that the realization of safety-aware perception testing remains an open issue since challenges concerning the three testing axes and their interdependencies currently do not appear to be sufficiently solved.
6-Layer Model for a Structured Description and Categorization of Urban Traffic and Environment
Dec 09, 2020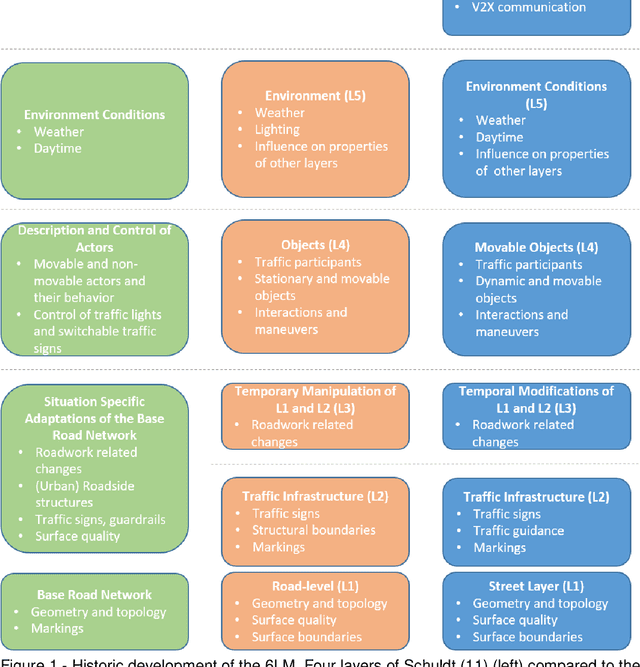
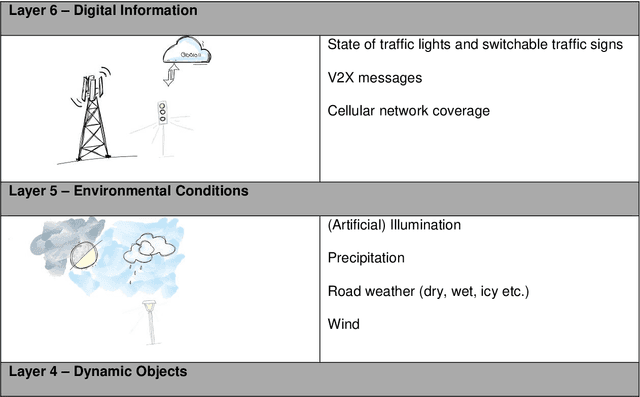
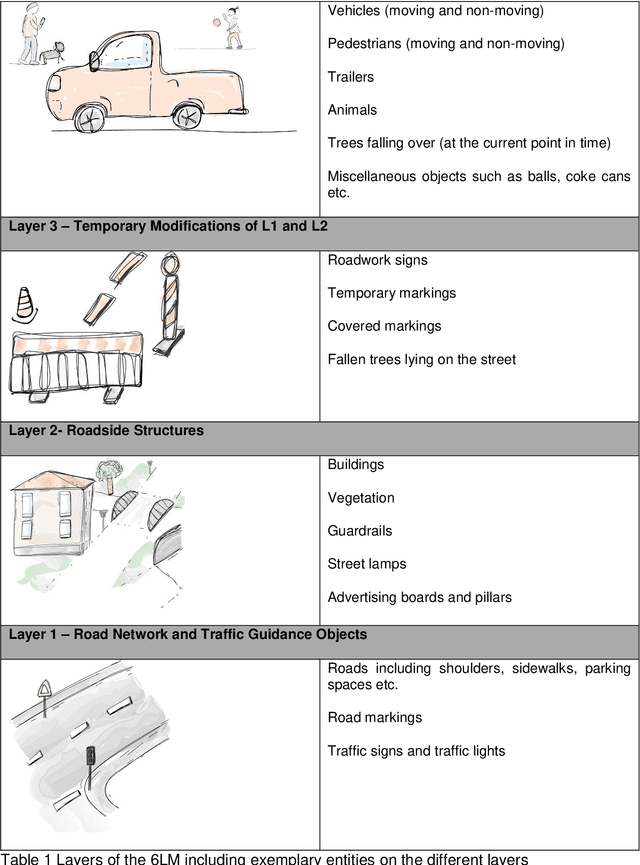
Verification and validation of automated driving functions impose large challenges. Currently, scenario-based approaches are investigated in research and industry, aiming at a reduction of testing efforts by specifying safety relevant scenarios. To define those scenarios and operate in a complex real-world design domain, a structured description of the environment is needed. Within the PEGASUS research project, the 6-Layer Model (6LM) was introduced for the description of highway scenarios. This paper refines the 6LM and extends it to urban traffic and environment. As defined in PEGASUS, the 6LM provides the possibility to categorize the environment and, therefore, functions as a structured basis for subsequent scenario description. The model enables a structured description and categorization of the general environment, without incorporating any knowledge or anticipating any functions of actors. Beyond that, there is a variety of other applications of the 6LM, which are elaborated in this paper. The 6LM includes a description of the road network and traffic guidance objects, roadside structures, temporary modifications of the former, dynamic objects, environmental conditions and digital information. The work at hand specifies each layer by categorizing its items. Guidelines are formulated and explanatory examples are given to standardize the application of the model for an objective environment description. In contrast to previous publications, the model and its design are described in far more detail. Finally, the holistic description of the 6LM presented includes remarks on possible future work when expanding the concept to machine perception aspects.