 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystem Theoretic View on Uncertainties
Mar 07, 2023


The complexity of the operating environment and required technologies for highly automated driving is unprecedented. A different type of threat to safe operation besides the fault-error-failure model by Laprie et al. arises in the form of performance limitations. We propose a system theoretic approach to handle these and derive a taxonomy based on uncertainty, i.e. lack of knowledge, as a root cause. Uncertainty is a threat to the dependability of a system, as it limits our ability to assess its dependability properties. We distinguish uncertainties by aleatory (inherent to probabilistic models), epistemic (lack of model parameter knowledge) and ontological (incompleteness of models) in order to determine strategies and methods to cope with them. Analogous to the taxonomy of Laprie et al. we cluster methods into uncertainty prevention (use of elements with well-known behavior, avoiding architectures prone to emergent behavior, restriction of operational design domain, etc.), uncertainty removal (during design time by design of experiment, etc. and after release by field observation, continuous updates, etc.), uncertainty tolerance (use of redundant architectures with diverse uncertainties, uncertainty aware deep learning, etc.) and uncertainty forecasting (estimation of residual uncertainty, etc.).
Grasping Causality for the Explanation of Criticality for Automated Driving
Oct 27, 2022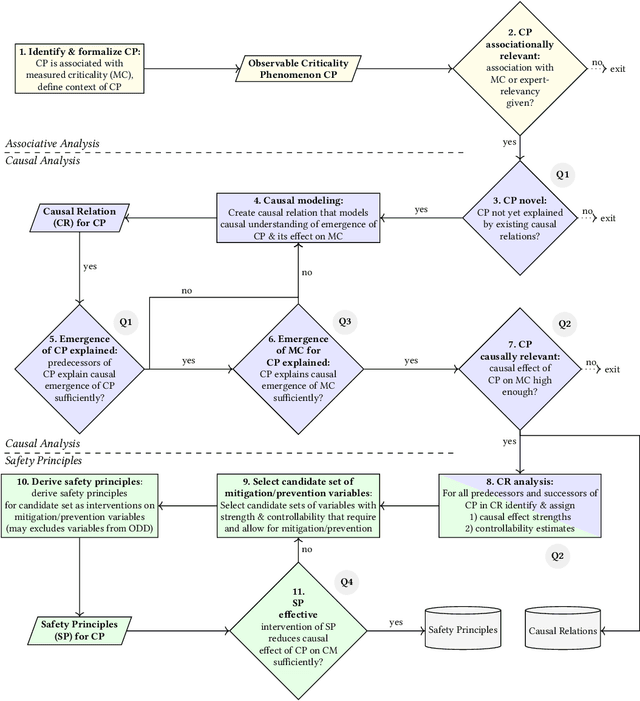
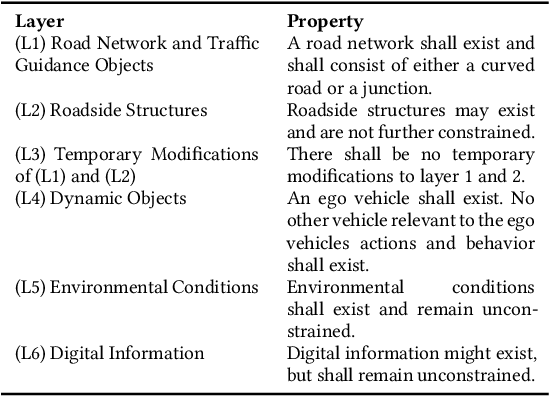
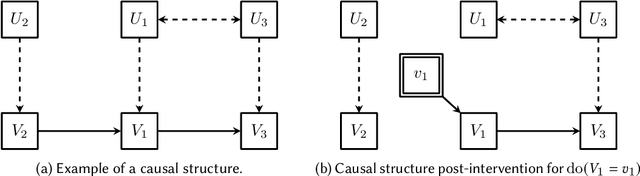
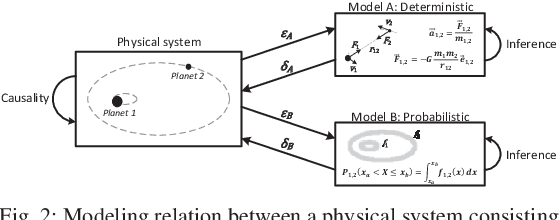
The verification and validation of automated driving systems at SAE levels 4 and 5 is a multi-faceted challenge for which classical statistical considerations become infeasible. For this, contemporary approaches suggest a decomposition into scenario classes combined with statistical analysis thereof regarding the emergence of criticality. Unfortunately, these associational approaches may yield spurious inferences, or worse, fail to recognize the causalities leading to critical scenarios, which are, in turn, prerequisite for the development and safeguarding of automated driving systems. As to incorporate causal knowledge within these processes, this work introduces a formalization of causal queries whose answers facilitate a causal understanding of safety-relevant influencing factors for automated driving. This formalized causal knowledge can be used to specify and implement abstract safety principles that provably reduce the criticality associated with these influencing factors. Based on Judea Pearl's causal theory, we define a causal relation as a causal structure together with a context, both related to a domain ontology, where the focus lies on modeling the effect of such influencing factors on criticality as measured by a suitable metric. As to assess modeling quality, we suggest various quantities and evaluate them on a small example. As availability and quality of data are imperative for validly estimating answers to the causal queries, we also discuss requirements on real-world and synthetic data acquisition. We thereby contribute to establishing causal considerations at the heart of the safety processes that are urgently needed as to ensure the safe operation of automated driving systems.