 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Roadmap Towards Resilient Internet of Things for Cyber-Physical Systems
Nov 06, 2018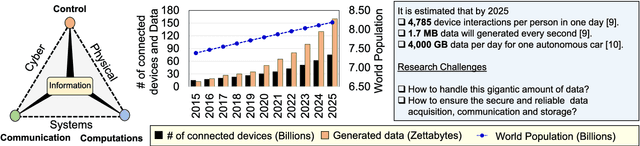
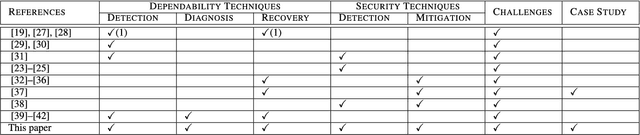
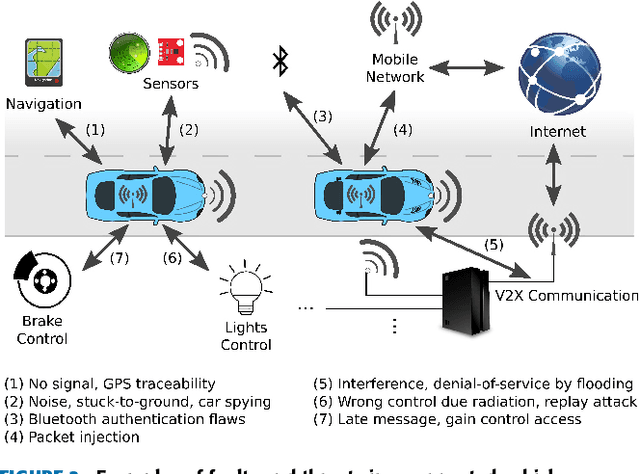

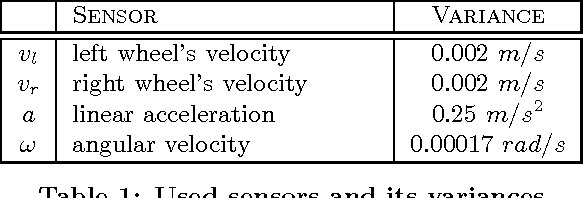
The Internet of Things (IoT) is a ubiquitous system connecting many different devices - the things - which can be accessed from the distance. The cyber-physical systems (CPS) monitor and control the things from the distance. As a result, the concepts of dependability and security get deeply intertwined. The increasing level of dynamicity, heterogeneity, and complexity adds to the system's vulnerability, and challenges its ability to react to faults. This paper summarizes state-of-the-art of existing work on anomaly detection, fault-tolerance and self-healing, and adds a number of other methods applicable to achieve resilience in an IoT. We particularly focus on non-intrusive methods ensuring data integrity in the network. Furthermore, this paper presents the main challenges in building a resilient IoT for CPS which is crucial in the era of smart CPS with enhanced connectivity (an excellent example of such a system is connected autonomous vehicles). It further summarizes our solutions, work-in-progress and future work to this topic to enable "Trustworthy IoT for CPS". Finally, this framework is illustrated on a selected use case: A smart sensor infrastructure in the transport domain.
Deep Neural Programs for Adaptive Control in Cyber-Physical Systems
Feb 13, 2015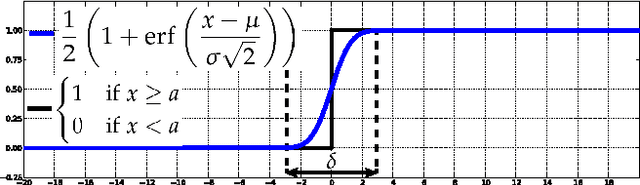
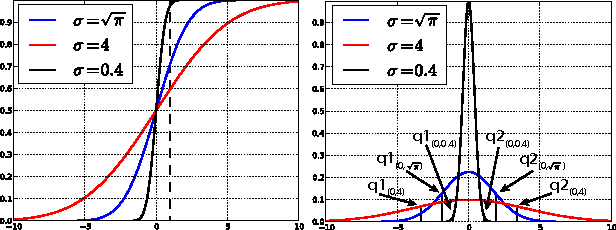
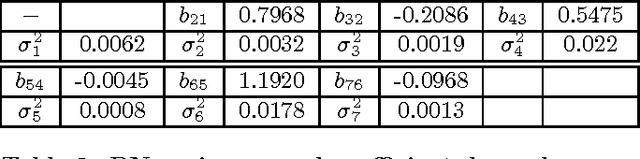
We introduce Deep Neural Programs (DNP), a novel programming paradigm for writing adaptive controllers for cy-ber-physical systems (CPS). DNP replace if and while statements, whose discontinuity is responsible for undecidability in CPS analysis, intractability in CPS design, and frailness in CPS implementation, with their smooth, neural nif and nwhile counterparts. This not only makes CPS analysis decidable and CPS design tractable, but also allows to write robust and adaptive CPS code. In DNP the connection between the sigmoidal guards of the nif and nwhile statements has to be given as a Gaussian Bayesian network, which reflects the partial knowledge, the CPS program has about its environment. To the best of our knowledge, DNP are the first approach linking neural networks to programs, in a way that makes explicit the meaning of the network. In order to prove and validate the usefulness of DNP, we use them to write and learn an adaptive CPS controller for the parallel parking of the Pioneer rovers available in our CPS lab.