Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Networks for Safety-Critical Applications - Challenges, Experiments and Perspectives
Sep 04, 2017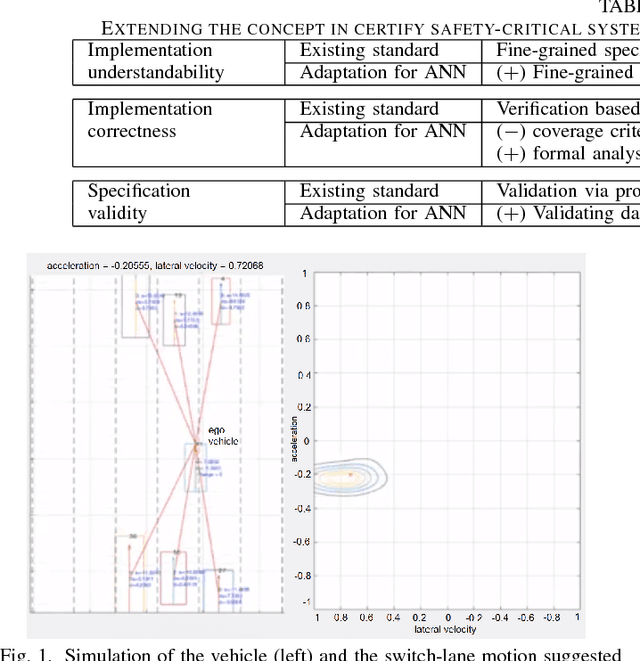
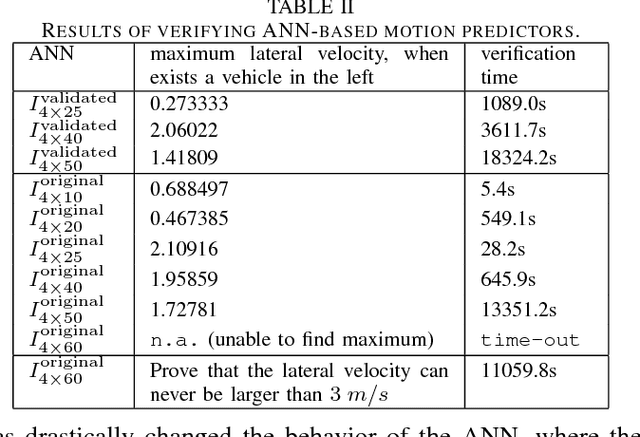
We propose a methodology for designing dependable Artificial Neural Networks (ANN) by extending the concepts of understandability, correctness, and validity that are crucial ingredients in existing certification standards. We apply the concept in a concrete case study in designing a high-way ANN-based motion predictor to guarantee safety properties such as impossibility for the ego vehicle to suggest moving to the right lane if there exists another vehicle on its right.
* Summary for activities conducted in the fortiss
Eigenforschungsprojekt "TdpSW - Towards dependable and predictable SW for
ML-based autonomous systems". All ANN-based motion predictors being formally
analyzed are available in the source file
Via