 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-Empowered Functional Safety and Security by Design in Automotive Systems
Jan 05, 2026This paper presents LLM-empowered workflow to support Software Defined Vehicle (SDV) software development, covering the aspects of security-aware system topology design, as well as event-driven decision-making code analysis. For code analysis we adopt event chains model which provides formal foundations to systematic validation of functional safety, taking into account the semantic validity of messages exchanged between key components, including both CAN and Vehicle Signal Specification (VSS). Analysis of security aspects for topology relies on synergy with Model-Driven Engineering (MDE) approach and Object Constraint Language (OCL) rules. Both locally deployable and proprietary solution are taken into account for evaluation within Advanced Driver-Assistance Systems (ADAS)-related scenarios.
Optimizing Retrieval Augmented Generation for Object Constraint Language
May 19, 2025The Object Constraint Language (OCL) is essential for defining precise constraints within Model-Based Systems Engineering (MBSE). However, manually writing OCL rules is complex and time-consuming. This study explores the optimization of Retrieval-Augmented Generation (RAG) for automating OCL rule generation, focusing on the impact of different retrieval strategies. We evaluate three retrieval approaches $\unicode{x2013}$ BM25 (lexical-based), BERT-based (semantic retrieval), and SPLADE (sparse-vector retrieval) $\unicode{x2013}$ analyzing their effectiveness in providing relevant context for a large language model. To further assess our approach, we compare and benchmark our retrieval-optimized generation results against PathOCL, a state-of-the-art graph-based method. We directly compare BM25, BERT, and SPLADE retrieval methods with PathOCL to understand how different retrieval methods perform for a unified evaluation framework. Our experimental results, focusing on retrieval-augmented generation, indicate that while retrieval can enhance generation accuracy, its effectiveness depends on the retrieval method and the number of retrieved chunks (k). BM25 underperforms the baseline, whereas semantic approaches (BERT and SPLADE) achieve better results, with SPLADE performing best at lower k values. However, excessive retrieval with high k parameter can lead to retrieving irrelevant chunks which degrades model performance. Our findings highlight the importance of optimizing retrieval configurations to balance context relevance and output consistency. This research provides insights into improving OCL rule generation using RAG and underscores the need for tailoring retrieval.
LLM-based Iterative Approach to Metamodeling in Automotive
Mar 07, 2025In this paper, we introduce an automated approach to domain-specific metamodel construction relying on Large Language Model (LLM). The main focus is adoption in automotive domain. As outcome, a prototype was implemented as web service using Python programming language, while OpenAI's GPT-4o was used as the underlying LLM. Based on the initial experiments, this approach successfully constructs Ecore metamodel based on set of automotive requirements and visualizes it making use of PlantUML notation, so human experts can provide feedback in order to refine the result. Finally, locally deployable solution is also considered, including the limitations and additional steps required.
Multi-modal Summarization in Model-Based Engineering: Automotive Software Development Case Study
Mar 06, 2025Multimodal summarization integrating information from diverse data modalities presents a promising solution to aid the understanding of information within various processes. However, the application and advantages of multimodal summarization have not received much attention in model-based engineering (MBE), where it has become a cornerstone in the design and development of complex systems, leveraging formal models to improve understanding, validation and automation throughout the engineering lifecycle. UML and EMF diagrams in model-based engineering contain a large amount of multimodal information and intricate relational data. Hence, our study explores the application of multimodal large language models within the domain of model-based engineering to evaluate their capacity for understanding and identifying relationships, features, and functionalities embedded in UML and EMF diagrams. We aim to demonstrate the transformative potential benefits and limitations of multimodal summarization in improving productivity and accuracy in MBE practices. The proposed approach is evaluated within the context of automotive software development, while many promising state-of-art models were taken into account.
Virtualization & Microservice Architecture for Software-Defined Vehicles: An Evaluation and Exploration
Dec 13, 2024



The emergence of Software-Defined Vehicles (SDVs) signifies a shift from a distributed network of electronic control units (ECUs) to a centralized computing architecture within the vehicle's electrical and electronic systems. This transition addresses the growing complexity and demand for enhanced functionality in traditional E/E architectures, with containerization and virtualization streamlining software development and updates within the SDV framework. While widely used in cloud computing, their performance and suitability for intelligent vehicles have yet to be thoroughly evaluated. In this work, we conduct a comprehensive performance evaluation of containerization and virtualization on embedded and high-performance AMD64 and ARM64 systems, focusing on CPU, memory, network, and disk metrics. In addition, we assess their impact on real-world automotive applications using the Autoware framework and further integrate a microservice-based architecture to evaluate its start-up time and resource consumption. Our extensive experiments reveal a slight 0-5% performance decline in CPU, memory, and network usage for both containerization and virtualization compared to bare-metal setups, with more significant reductions in disk operations-5-15% for containerized environments and up to 35% for virtualized setups. Despite these declines, experiments with actual vehicle applications demonstrate minimal impact on the Autoware framework, and in some cases, a microservice architecture integration improves start-up time by up to 18%.
Gassidy: Gaussian Splatting SLAM in Dynamic Environments
Nov 23, 20243D Gaussian Splatting (3DGS) allows flexible adjustments to scene representation, enabling continuous optimization of scene quality during dense visual simultaneous localization and mapping (SLAM) in static environments. However, 3DGS faces challenges in handling environmental disturbances from dynamic objects with irregular movement, leading to degradation in both camera tracking accuracy and map reconstruction quality. To address this challenge, we develop an RGB-D dense SLAM which is called Gaussian Splatting SLAM in Dynamic Environments (Gassidy). This approach calculates Gaussians to generate rendering loss flows for each environmental component based on a designed photometric-geometric loss function. To distinguish and filter environmental disturbances, we iteratively analyze rendering loss flows to detect features characterized by changes in loss values between dynamic objects and static components. This process ensures a clean environment for accurate scene reconstruction. Compared to state-of-the-art SLAM methods, experimental results on open datasets show that Gassidy improves camera tracking precision by up to 97.9% and enhances map quality by up to 6%.
Adopting RAG for LLM-Aided Future Vehicle Design
Nov 14, 2024In this paper, we explore the integration of Large Language Models (LLMs) with Retrieval-Augmented Generation (RAG) to enhance automated design and software development in the automotive industry. We present two case studies: a standardization compliance chatbot and a design copilot, both utilizing RAG to provide accurate, context-aware responses. We evaluate four LLMs-GPT-4o, LLAMA3, Mistral, and Mixtral -- comparing their answering accuracy and execution time. Our results demonstrate that while GPT-4 offers superior performance, LLAMA3 and Mistral also show promising capabilities for local deployment, addressing data privacy concerns in automotive applications. This study highlights the potential of RAG-augmented LLMs in improving design workflows and compliance in automotive engineering.
A Containerized Microservice Architecture for a ROS 2 Autonomous Driving Software: An End-to-End Latency Evaluation
Apr 19, 2024The automotive industry is transitioning from traditional ECU-based systems to software-defined vehicles. A central role of this revolution is played by containers, lightweight virtualization technologies that enable the flexible consolidation of complex software applications on a common hardware platform. Despite their widespread adoption, the impact of containerization on fundamental real-time metrics such as end-to-end latency, communication jitter, as well as memory and CPU utilization has remained virtually unexplored. This paper presents a microservice architecture for a real-world autonomous driving application where containers isolate each service. Our comprehensive evaluation shows the benefits in terms of end-to-end latency of such a solution even over standard bare-Linux deployments. Specifically, in the case of the presented microservice architecture, the mean end-to-end latency can be improved by 5-8 %. Also, the maximum latencies were significantly reduced using container deployment.
Synergy of Large Language Model and Model Driven Engineering for Automated Development of Centralized Vehicular Systems
Apr 08, 2024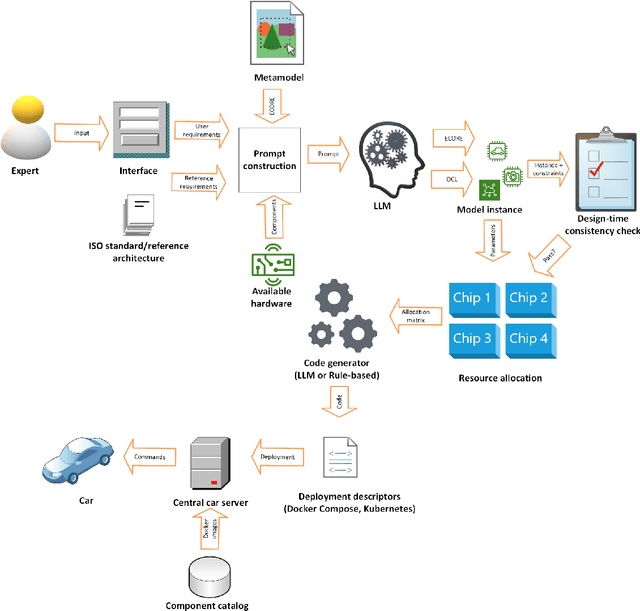

We present a prototype of a tool leveraging the synergy of model driven engineering (MDE) and Large Language Models (LLM) for the purpose of software development process automation in the automotive industry. In this approach, the user-provided input is free form textual requirements, which are first translated to Ecore model instance representation using an LLM, which is afterwards checked for consistency using Object Constraint Language (OCL) rules. After successful consistency check, the model instance is fed as input to another LLM for the purpose of code generation. The generated code is evaluated in a simulated environment using CARLA simulator connected to an example centralized vehicle architecture, in an emergency brake scenario.
Towards Single-System Illusion in Software-Defined Vehicles -- Automated, AI-Powered Workflow
Mar 21, 2024We propose a novel model- and feature-based approach to development of vehicle software systems, where the end architecture is not explicitly defined. Instead, it emerges from an iterative process of search and optimization given certain constraints, requirements and hardware architecture, while retaining the property of single-system illusion, where applications run in a logically uniform environment. One of the key points of the presented approach is the inclusion of modern generative AI, specifically Large Language Models (LLMs), in the loop. With the recent advances in the field, we expect that the LLMs will be able to assist in processing of requirements, generation of formal system models, as well as generation of software deployment specification and test code. The resulting pipeline is automated to a large extent, with feedback being generated at each step.