 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtualization & Microservice Architecture for Software-Defined Vehicles: An Evaluation and Exploration
Dec 13, 2024



The emergence of Software-Defined Vehicles (SDVs) signifies a shift from a distributed network of electronic control units (ECUs) to a centralized computing architecture within the vehicle's electrical and electronic systems. This transition addresses the growing complexity and demand for enhanced functionality in traditional E/E architectures, with containerization and virtualization streamlining software development and updates within the SDV framework. While widely used in cloud computing, their performance and suitability for intelligent vehicles have yet to be thoroughly evaluated. In this work, we conduct a comprehensive performance evaluation of containerization and virtualization on embedded and high-performance AMD64 and ARM64 systems, focusing on CPU, memory, network, and disk metrics. In addition, we assess their impact on real-world automotive applications using the Autoware framework and further integrate a microservice-based architecture to evaluate its start-up time and resource consumption. Our extensive experiments reveal a slight 0-5% performance decline in CPU, memory, and network usage for both containerization and virtualization compared to bare-metal setups, with more significant reductions in disk operations-5-15% for containerized environments and up to 35% for virtualized setups. Despite these declines, experiments with actual vehicle applications demonstrate minimal impact on the Autoware framework, and in some cases, a microservice architecture integration improves start-up time by up to 18%.
Gassidy: Gaussian Splatting SLAM in Dynamic Environments
Nov 23, 20243D Gaussian Splatting (3DGS) allows flexible adjustments to scene representation, enabling continuous optimization of scene quality during dense visual simultaneous localization and mapping (SLAM) in static environments. However, 3DGS faces challenges in handling environmental disturbances from dynamic objects with irregular movement, leading to degradation in both camera tracking accuracy and map reconstruction quality. To address this challenge, we develop an RGB-D dense SLAM which is called Gaussian Splatting SLAM in Dynamic Environments (Gassidy). This approach calculates Gaussians to generate rendering loss flows for each environmental component based on a designed photometric-geometric loss function. To distinguish and filter environmental disturbances, we iteratively analyze rendering loss flows to detect features characterized by changes in loss values between dynamic objects and static components. This process ensures a clean environment for accurate scene reconstruction. Compared to state-of-the-art SLAM methods, experimental results on open datasets show that Gassidy improves camera tracking precision by up to 97.9% and enhances map quality by up to 6%.
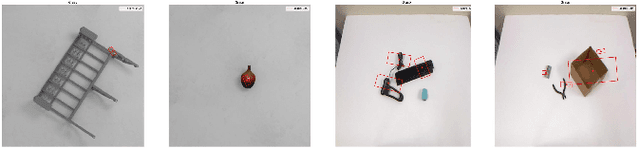
Grasp Planning for Flexible Production with Small Lot Sizes based on CAD models using GPIS and Bayesian Optimization
May 24, 2021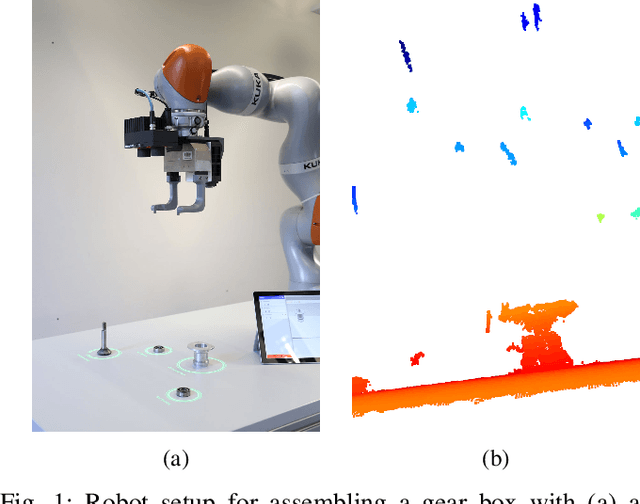


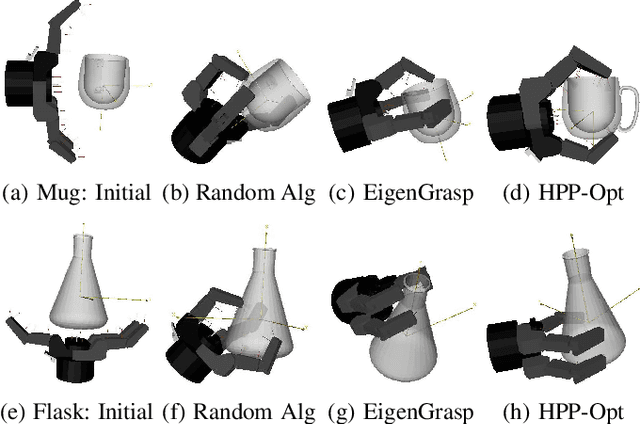
Grasp planning for multi-fingered hands is still a challenging task due to the high nonlinear quality metrics, the high dimensionality of hand posture configuration, and complex object shapes. Analytical-based grasp planning algorithms formulate the grasping problem as a constraint optimization problem using advanced convex optimization solvers. However, these are not guaranteed to find a globally optimal solution. Data-driven based algorithms utilize machine learning algorithm frameworks to learn the grasp policy using enormous training data sets. This paper presents a new approach for grasp generation by formulating a global optimization problem with Bayesian optimization. Furthermore, we parameterize the object shape utilizing the Gaussian Process Implicit Surface (GPIS) to integrate the object shape information into the optimization process. Moreover, a chart defined on the object surface is used to refine palm pose locally. We introduced a dual optimization stage to optimize the palm pose and contact points separately. We further extend the Bayesian optimization by utilizing the alternating direction method of multipliers (ADMM) to eliminate contact optimization constraints. We conduct the experiments in the graspit! Simulator that demonstrates the effectiveness of this approach quantitatively and qualitatively. Our approach achieves a 95% success rate on various commonly objects with diverse shapes, scales, and weights
Lightweight Convolutional Neural Network with Gaussian-based Grasping Representation for Robotic Grasping Detection
Jan 25, 2021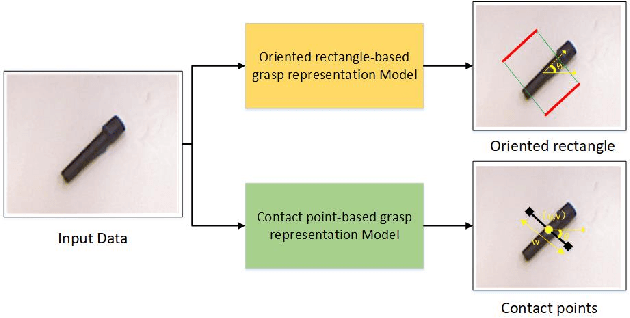
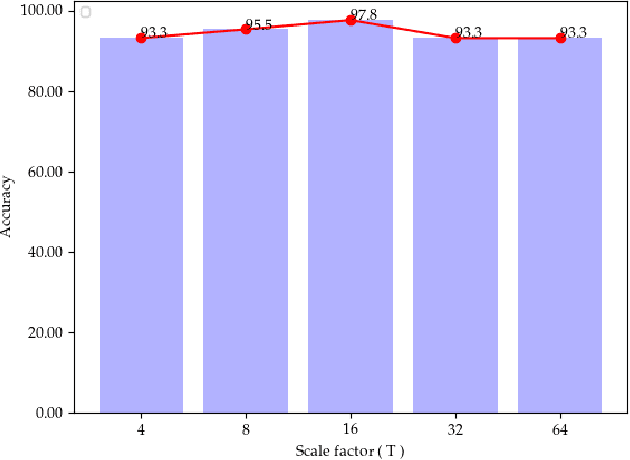
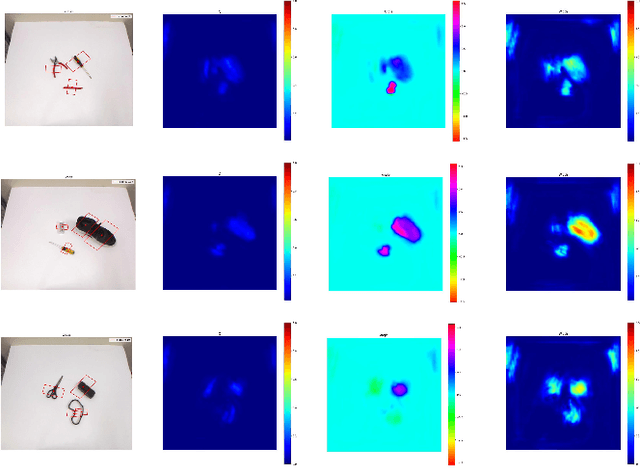
The method of deep learning has achieved excellent results in improving the performance of robotic grasping detection. However, the deep learning methods used in general object detection are not suitable for robotic grasping detection. Current modern object detectors are difficult to strike a balance between high accuracy and fast inference speed. In this paper, we present an efficient and robust fully convolutional neural network model to perform robotic grasping pose estimation from an n-channel input image of the real grasping scene. The proposed network is a lightweight generative architecture for grasping detection in one stage. Specifically, a grasping representation based on Gaussian kernel is introduced to encode training samples, which embodies the principle of maximum central point grasping confidence. Meanwhile, to extract multi-scale information and enhance the feature discriminability, a receptive field block (RFB) is assembled to the bottleneck of our grasping detection architecture. Besides, pixel attention and channel attention are combined to automatically learn to focus on fusing context information of varying shapes and sizes by suppressing the noise feature and highlighting the grasping object feature. Extensive experiments on two public grasping datasets, Cornell and Jacquard demonstrate the state-of-the-art performance of our method in balancing accuracy and inference speed. The network is an order of magnitude smaller than other excellent algorithms while achieving better performance with an accuracy of 98.9$\%$ and 95.6$\%$ on the Cornell and Jacquard datasets, respectively.
Oscillation Damping Control of Pendulum-like Manipulation Platform using Moving Masses
Sep 24, 2018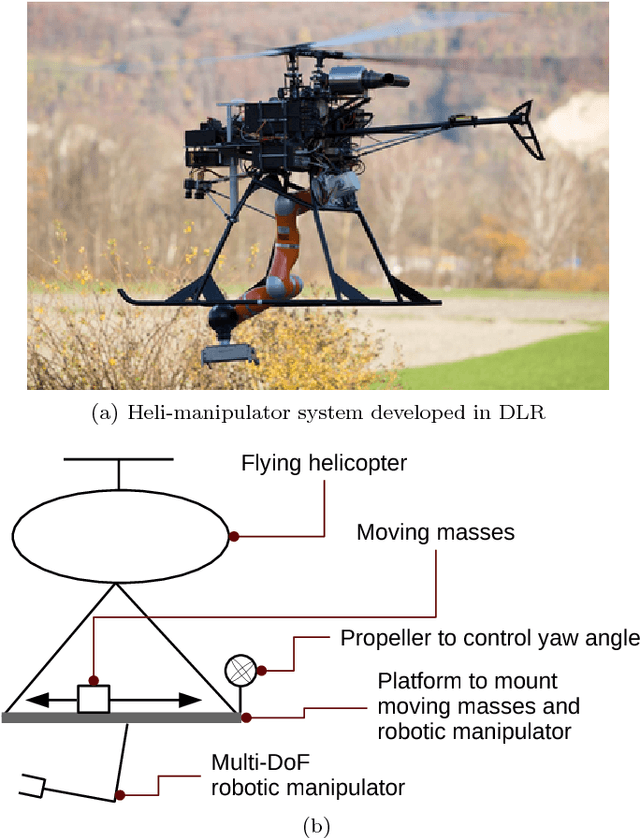
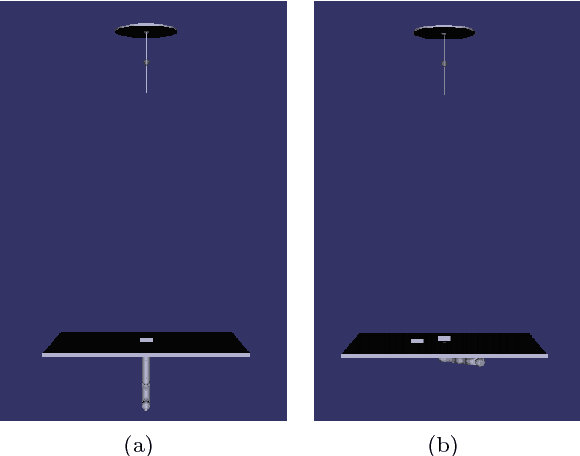
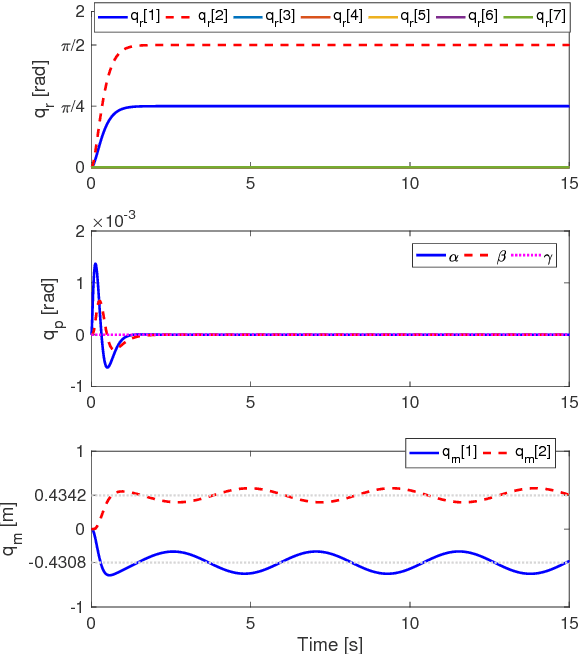
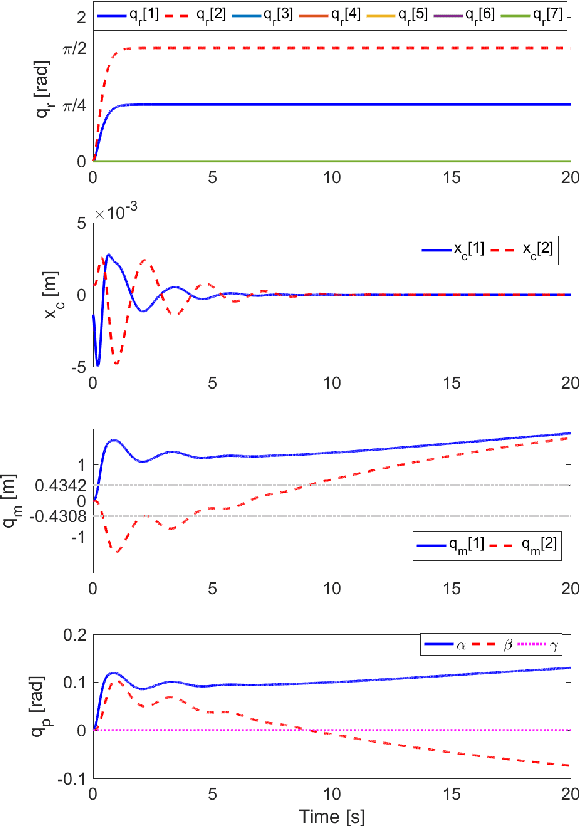
This paper presents an approach to damp out the oscillatory motion of the pendulum-like hanging platform on which a robotic manipulator is mounted. To this end, moving masses were installed on top of the platform. In this paper, asymptotic stability of the platform (which implies oscillation damping) is achieved by designing reference acceleration of the moving masses properly. A main feature of this work is that we can achieve asymptotic stability of not only the platform, but also the moving masses, which may be challenging due to the under-actuation nature. The proposed scheme is validated by the simulation studies.