 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficiently Learning Robust Torque-based Locomotion Through Reinforcement with Model-Based Supervision
Jan 22, 2026We propose a control framework that integrates model-based bipedal locomotion with residual reinforcement learning (RL) to achieve robust and adaptive walking in the presence of real-world uncertainties. Our approach leverages a model-based controller, comprising a Divergent Component of Motion (DCM) trajectory planner and a whole-body controller, as a reliable base policy. To address the uncertainties of inaccurate dynamics modeling and sensor noise, we introduce a residual policy trained through RL with domain randomization. Crucially, we employ a model-based oracle policy, which has privileged access to ground-truth dynamics during training, to supervise the residual policy via a novel supervised loss. This supervision enables the policy to efficiently learn corrective behaviors that compensate for unmodeled effects without extensive reward shaping. Our method demonstrates improved robustness and generalization across a range of randomized conditions, offering a scalable solution for sim-to-real transfer in bipedal locomotion.
Humanoid Robot Running Through Random Stepping Stones and Jumping Over Obstacles: Step Adaptation Using Spring-Mass Trajectories
Dec 15, 2025This study proposes a step adaptation framework for running through spring-mass trajectories and deadbeat control gain libraries. It includes four main parts: (1) Automatic spring-mass trajectory library generation; (2) Deadbeat control gain library generation through an actively controlled template model that resembles the whole-body dynamics well; (3) Trajectory selection policy development for step adaptation; (4) Mapping spring-mass trajectories to a humanoid model through a whole-body control (WBC) framework also accounting for closed-kinematic chain systems, self collisions, and reactive limb swinging. We show the inclusiveness and the robustness of the proposed framework through various challenging and agile behaviors such as running through randomly generated stepping stones, jumping over random obstacles, performing slalom motions, changing the running direction suddenly with a random leg, and rejecting significant disturbances and uncertainties through the MuJoCo physics simulator. We also perform additional simulations under a comprehensive set of uncertainties and noise to better justify the proposed method's robustness to real-world challenges, including signal noise, imprecision, modeling errors, and delays. All the aforementioned behaviors are performed with a single library and the same set of WBC control parameters without additional tuning. The spring-mass and the deadbeat control gain library are automatically computed in 4.5 seconds in total for 315 different trajectories.
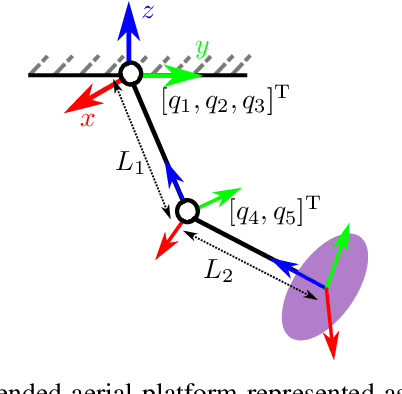
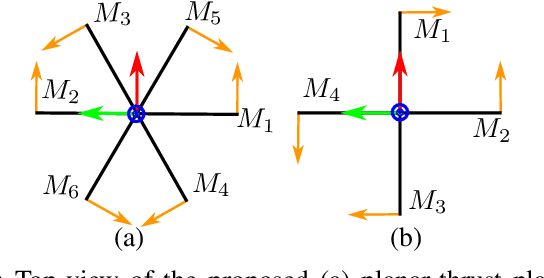
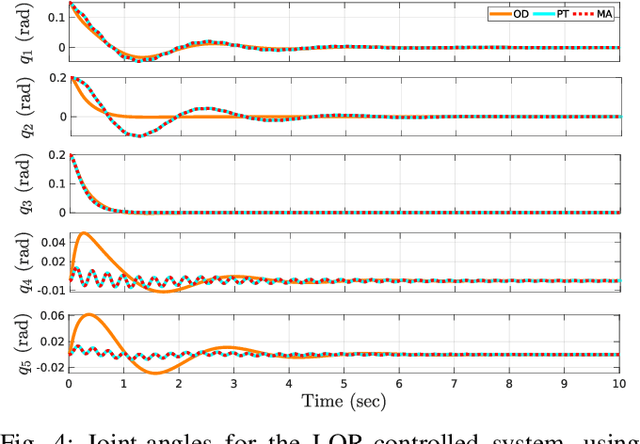
Partial Feedback Linearization Control of a Cable-Suspended Multirotor Platform for Stabilization of an Attached Load
Oct 15, 2025In this work, we present a novel control approach based on partial feedback linearization (PFL) for the stabilization of a suspended aerial platform with an attached load. Such systems are envisioned for various applications in construction sites involving cranes, such as the holding and transportation of heavy objects. Our proposed control approach considers the underactuation of the whole system while utilizing its coupled dynamics for stabilization. We demonstrate using numerical stability analysis that these coupled terms are crucial for the stabilization of the complete system. We also carried out robustness analysis of the proposed approach in the presence of external wind disturbances, sensor noise, and uncertainties in system dynamics. As our envisioned target application involves cranes in outdoor construction sites, our control approaches rely on only onboard sensors, thus making it suitable for such applications. We carried out extensive simulation studies and experimental tests to validate our proposed control approach.
Learning Swing-up Maneuvers for a Suspended Aerial Manipulation Platform in a Hierarchical Control Framework
Jun 16, 2025In this work, we present a novel approach to augment a model-based control method with a reinforcement learning (RL) agent and demonstrate a swing-up maneuver with a suspended aerial manipulation platform. These platforms are targeted towards a wide range of applications on construction sites involving cranes, with swing-up maneuvers allowing it to perch at a given location, inaccessible with purely the thrust force of the platform. Our proposed approach is based on a hierarchical control framework, which allows different tasks to be executed according to their assigned priorities. An RL agent is then subsequently utilized to adjust the reference set-point of the lower-priority tasks to perform the swing-up maneuver, which is confined in the nullspace of the higher-priority tasks, such as maintaining a specific orientation and position of the end-effector. Our approach is validated using extensive numerical simulation studies.
An Efficient Numerical Function Optimization Framework for Constrained Nonlinear Robotic Problems
Jan 30, 2025This paper presents a numerical function optimization framework designed for constrained optimization problems in robotics. The tool is designed with real-time considerations and is suitable for online trajectory and control input optimization problems. The proposed framework does not require any analytical representation of the problem and works with constrained block-box optimization functions. The method combines first-order gradient-based line search algorithms with constraint prioritization through nullspace projections onto constraint Jacobian space. The tool is implemented in C++ and provided online for community use, along with some numerical and robotic example implementations presented in this paper.
Realtime Limb Trajectory Optimization for Humanoid Running Through Centroidal Angular Momentum Dynamics
Jan 30, 2025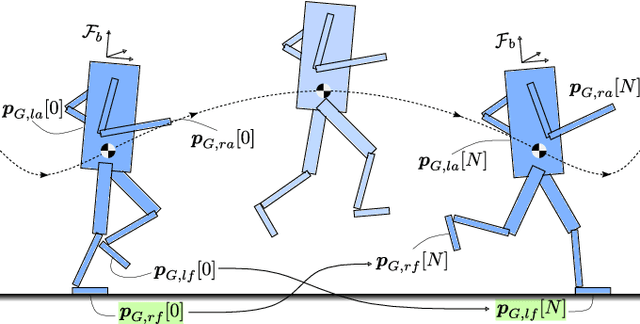
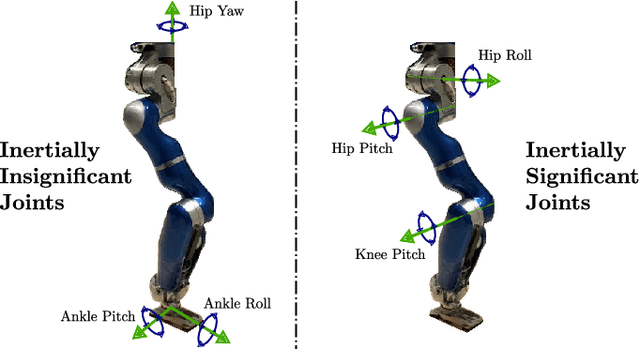
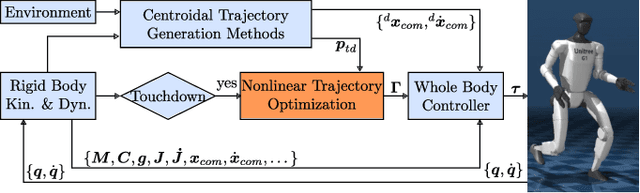
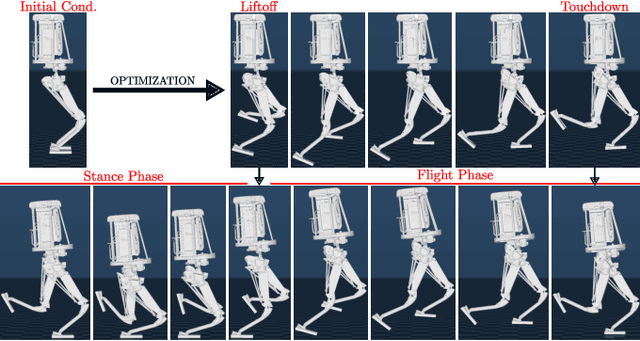
One of the essential aspects of humanoid robot running is determining the limb-swinging trajectories. During the flight phases, where the ground reaction forces are not available for regulation, the limb swinging trajectories are significant for the stability of the next stance phase. Due to the conservation of angular momentum, improper leg and arm swinging results in highly tilted and unsustainable body configurations at the next stance phase landing. In such cases, the robotic system fails to maintain locomotion independent of the stability of the center of mass trajectories. This problem is more apparent for fast and high flight time trajectories. This paper proposes a real-time nonlinear limb trajectory optimization problem for humanoid running. The optimization problem is tested on two different humanoid robot models, and the generated trajectories are verified using a running algorithm for both robots in a simulation environment.
Enhancing Model-Based Step Adaptation for Push Recovery through Reinforcement Learning of Step Timing and Region
Nov 01, 2024



This paper introduces a new approach to enhance the robustness of humanoid walking under strong perturbations, such as substantial pushes. Effective recovery from external disturbances requires bipedal robots to dynamically adjust their stepping strategies, including footstep positions and timing. Unlike most advanced walking controllers that restrict footstep locations to a predefined convex region, substantially limiting recoverable disturbances, our method leverages reinforcement learning to dynamically adjust the permissible footstep region, expanding it to a larger, effectively non-convex area and allowing cross-over stepping, which is crucial for counteracting large lateral pushes. Additionally, our method adapts footstep timing in real time to further extend the range of recoverable disturbances. Based on these adjustments, feasible footstep positions and DCM trajectory are planned by solving a QP. Finally, we employ a DCM controller and an inverse dynamics whole-body control framework to ensure the robot effectively follows the trajectory.
Shared Autonomy via Variable Impedance Control and Virtual Potential Fields for Encoding Human Demonstration
Mar 19, 2024This article introduces a framework for complex human-robot collaboration tasks, such as the co-manufacturing of furniture. For these tasks, it is essential to encode tasks from human demonstration and reproduce these skills in a compliant and safe manner. Therefore, two key components are addressed in this work: motion generation and shared autonomy. We propose a motion generator based on a time-invariant potential field, capable of encoding wrench profiles, complex and closed-loop trajectories, and additionally incorporates obstacle avoidance. Additionally, the paper addresses shared autonomy (SA) which enables synergetic collaboration between human operators and robots by dynamically allocating authority. Variable impedance control (VIC) and force control are employed, where impedance and wrench are adapted based on the human-robot autonomy factor derived from interaction forces. System passivity is ensured by an energy-tank based task passivation strategy. The framework's efficacy is validated through simulations and an experimental study employing a Franka Emika Research 3 robot.
Observer-based Controller Design for Oscillation Damping of a Novel Suspended Underactuated Aerial Platform
Jan 31, 2024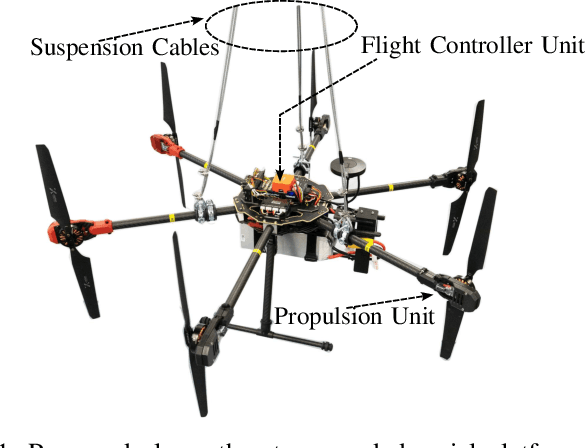
In this work, we present a novel actuation strategy for a suspended aerial platform. By utilizing an underactuation approach, we demonstrate the successful oscillation damping of the proposed platform, modeled as a spherical double pendulum. A state estimator is designed in order to obtain the deflection angles of the platform, which uses only onboard IMU measurements. The state estimator is an extended Kalman filter (EKF) with intermittent measurements obtained at different frequencies. An optimal state feedback controller and a PD+ controller are designed in order to dampen the oscillations of the platform in the joint space and task space respectively. The proposed underactuated platform is found to be more energy-efficient than an omnidirectional platform and requires fewer actuators. The effectiveness of our proposed system is validated using both simulations and experimental studies.
Hierarchical Whole-body Control of the cable-Suspended Aerial Manipulator endowed with Winch-based Actuation
May 25, 2023



During operation, aerial manipulation systems are affected by various disturbances. Among them is a gravitational torque caused by the weight of the robotic arm. Common propeller-based actuation is ineffective against such disturbances because of possible overheating and high power consumption. To overcome this issue, in this paper we propose a winchbased actuation for the crane-stationed cable-suspended aerial manipulator. Three winch-controlled suspension rigging cables produce a desired cable tension distribution to generate a wrench that reduces the effect of gravitational torque. In order to coordinate the robotic arm and the winch-based actuation, a model-based hierarchical whole-body controller is adapted. It resolves two tasks: keeping the robotic arm end-effector at the desired pose and shifting the system center of mass in the location with zero gravitational torque. The performance of the introduced actuation system as well as control strategy is validated through experimental studies.