 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual-Inertial Telepresence for Aerial Manipulation
Mar 25, 2020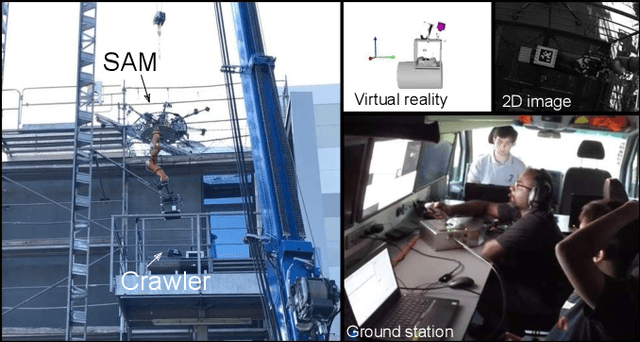
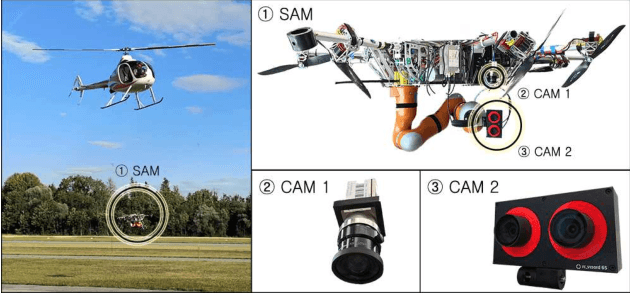

This paper presents a novel telepresence system for enhancing aerial manipulation capabilities. It involves not only a haptic device, but also a virtual reality that provides a 3D visual feedback to a remotely-located teleoperator in real-time. We achieve this by utilizing onboard visual and inertial sensors, an object tracking algorithm and a pre-generated object database. As the virtual reality has to closely match the real remote scene, we propose an extension of a marker tracking algorithm with visual-inertial odometry. Both indoor and outdoor experiments show benefits of our proposed system in achieving advanced aerial manipulation tasks, namely grasping, placing, force exertion and peg-in-hole insertion.
Optimal Oscillation Damping Control of cable-Suspended Aerial Manipulator with a Single IMU Sensor
Mar 01, 2020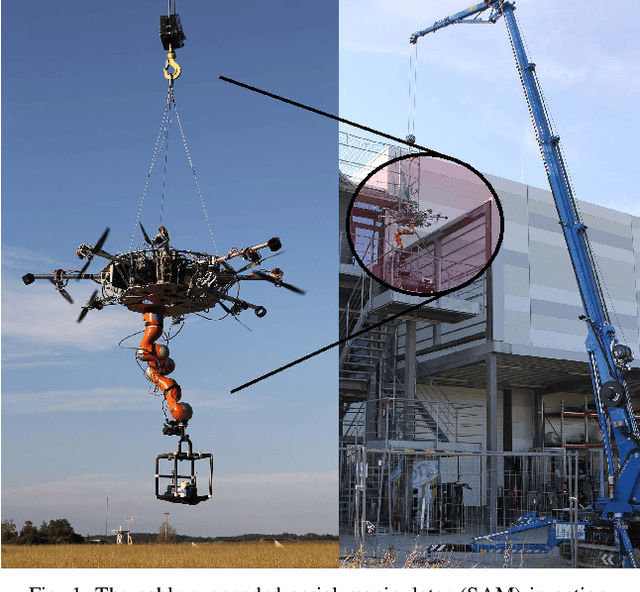
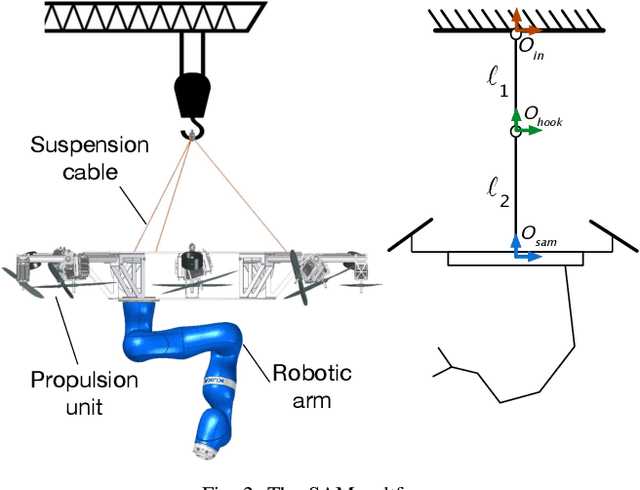
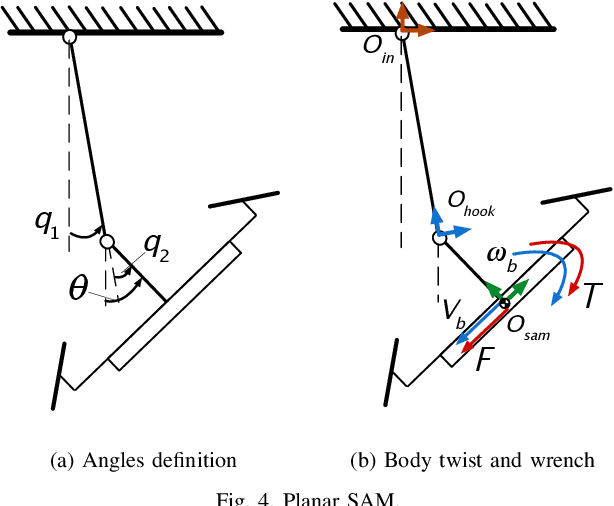
This paper presents a design of oscillation damping control for the cable-Suspended Aerial Manipulator (SAM). The SAM is modeled as a double pendulum, and it can generate a body wrench as a control action. The main challenge is the fact that there is only one onboard IMU sensor which does not provide full information on the system state. To overcome this difficulty, we design a controller motivated by a simplified SAM model. The proposed controller is very simple yet robust to model uncertainties. Moreover, we propose a gain tuning rule by formulating the proposed controller in the form of output feedback linear quadratic regulation problem. Consequently, it is possible to quickly dampen oscillations with minimal energy consumption. The proposed approach is validated through simulations and experiments.
Development of SAM: cable-Suspended Aerial Manipulator
Mar 06, 2019
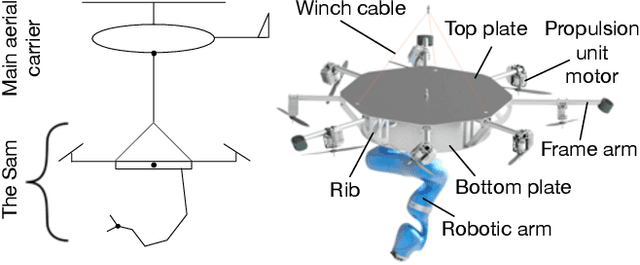
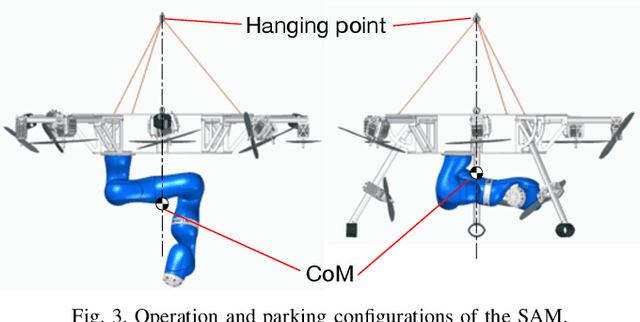
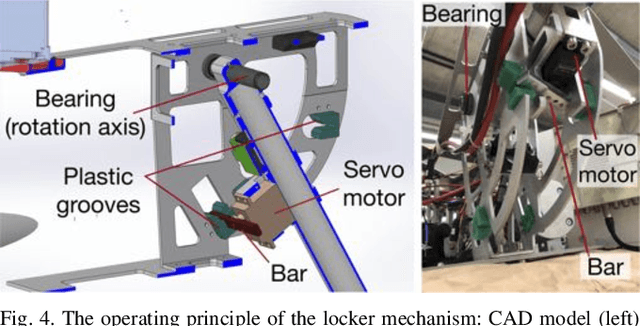
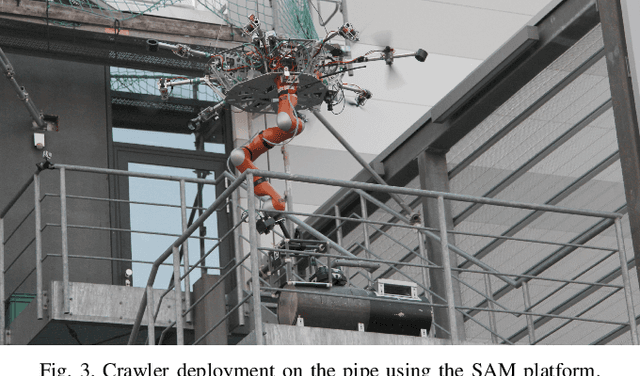
High risk of a collision between rotor blades and the obstacles in a complex environment imposes restrictions on the aerial manipulators. To solve this issue, a novel system cable-Suspended Aerial Manipulator (SAM) is presented in this paper. Instead of attaching a robotic manipulator directly to an aerial carrier, it is mounted on an active platform which is suspended on the carrier by means of a cable. As a result, higher safety can be achieved because the aerial carrier can keep a distance from the obstacles. For self-stabilization, the SAM is equipped with two actuation systems: winches and propulsion units. This paper presents an overview of the SAM including the concept behind, hardware realization, control strategy, and the first experimental results.