 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPIRIT: Perceptive Shared Autonomy for Robust Robotic Manipulation under Deep Learning Uncertainty
Mar 05, 2026Deep learning (DL) has enabled impressive advances in robotic perception, yet its limited robustness and lack of interpretability hinder reliable deployment in safety critical applications. We propose a concept termed perceptive shared autonomy, in which uncertainty estimates from DL based perception are used to regulate the level of autonomy. Specifically, when the robot's perception is confident, semi-autonomous manipulation is enabled to improve performance; when uncertainty increases, control transitions to haptic teleoperation for maintaining robustness. In this way, high-performing but uninterpretable DL methods can be integrated safely into robotic systems. A key technical enabler is an uncertainty aware DL based point cloud registration approach based on the so called Neural Tangent Kernels (NTK). We evaluate perceptive shared autonomy on challenging aerial manipulation tasks through a user study of 15 participants and realization of mock-up industrial scenarios, demonstrating reliable robotic manipulation despite failures in DL based perception. The resulting system, named SPIRIT, improves both manipulation performance and system reliability. SPIRIT was selected as a finalist of a major industrial innovation award.
Towards Explaining Uncertainty Estimates in Point Cloud Registration
Dec 29, 2024Iterative Closest Point (ICP) is a commonly used algorithm to estimate transformation between two point clouds. The key idea of this work is to leverage recent advances in explainable AI for probabilistic ICP methods that provide uncertainty estimates. Concretely, we propose a method that can explain why a probabilistic ICP method produced a particular output. Our method is based on kernel SHAP (SHapley Additive exPlanations). With this, we assign an importance value to common sources of uncertainty in ICP such as sensor noise, occlusion, and ambiguous environments. The results of the experiment show that this explanation method can reasonably explain the uncertainty sources, providing a step towards robots that know when and why they failed in a human interpretable manner
Topology-Matching Normalizing Flows for Out-of-Distribution Detection in Robot Learning
Nov 11, 2023



To facilitate reliable deployments of autonomous robots in the real world, Out-of-Distribution (OOD) detection capabilities are often required. A powerful approach for OOD detection is based on density estimation with Normalizing Flows (NFs). However, we find that prior work with NFs attempts to match the complex target distribution topologically with naive base distributions leading to adverse implications. In this work, we circumvent this topological mismatch using an expressive class-conditional base distribution trained with an information-theoretic objective to match the required topology. The proposed method enjoys the merits of wide compatibility with existing learned models without any performance degradation and minimum computation overhead while enhancing OOD detection capabilities. We demonstrate superior results in density estimation and 2D object detection benchmarks in comparison with extensive baselines. Moreover, we showcase the applicability of the method with a real-robot deployment.
Learning Expressive Priors for Generalization and Uncertainty Estimation in Neural Networks
Jul 15, 2023


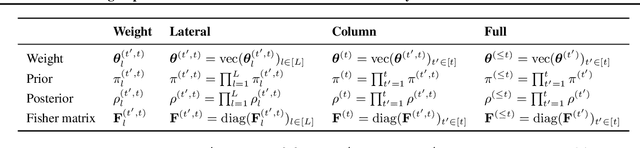
In this work, we propose a novel prior learning method for advancing generalization and uncertainty estimation in deep neural networks. The key idea is to exploit scalable and structured posteriors of neural networks as informative priors with generalization guarantees. Our learned priors provide expressive probabilistic representations at large scale, like Bayesian counterparts of pre-trained models on ImageNet, and further produce non-vacuous generalization bounds. We also extend this idea to a continual learning framework, where the favorable properties of our priors are desirable. Major enablers are our technical contributions: (1) the sums-of-Kronecker-product computations, and (2) the derivations and optimizations of tractable objectives that lead to improved generalization bounds. Empirically, we exhaustively show the effectiveness of this method for uncertainty estimation and generalization.
Virtual Reality via Object Poses and Active Learning: Realizing Telepresence Robots with Aerial Manipulation Capabilities
Oct 18, 2022
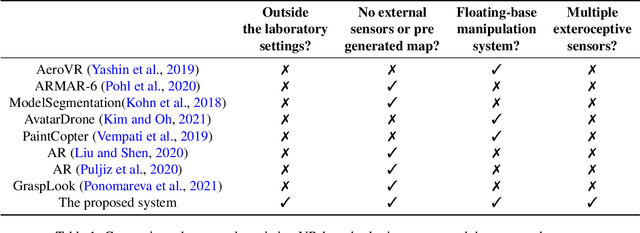
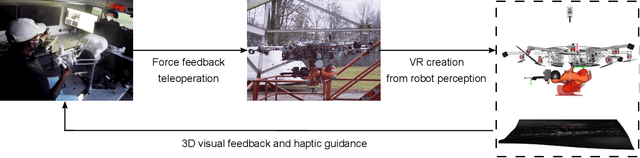
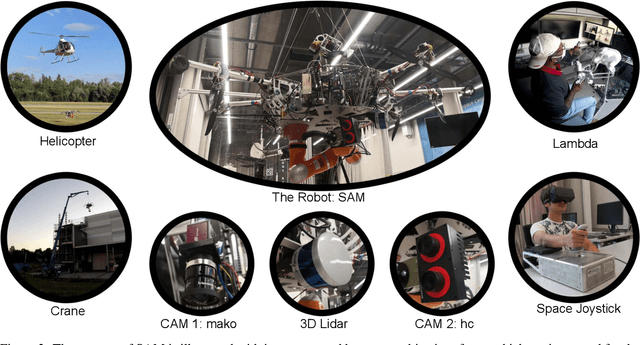
This article presents a novel telepresence system for advancing aerial manipulation in dynamic and unstructured environments. The proposed system not only features a haptic device, but also a virtual reality (VR) interface that provides real-time 3D displays of the robot's workspace as well as a haptic guidance to its remotely located operator. To realize this, multiple sensors namely a LiDAR, cameras and IMUs are utilized. For processing of the acquired sensory data, pose estimation pipelines are devised for industrial objects of both known and unknown geometries. We further propose an active learning pipeline in order to increase the sample efficiency of a pipeline component that relies on Deep Neural Networks (DNNs) based object detection. All these algorithms jointly address various challenges encountered during the execution of perception tasks in industrial scenarios. In the experiments, exhaustive ablation studies are provided to validate the proposed pipelines. Methodologically, these results commonly suggest how an awareness of the algorithms' own failures and uncertainty ("introspection") can be used tackle the encountered problems. Moreover, outdoor experiments are conducted to evaluate the effectiveness of the overall system in enhancing aerial manipulation capabilities. In particular, with flight campaigns over days and nights, from spring to winter, and with different users and locations, we demonstrate over 70 robust executions of pick-and-place, force application and peg-in-hole tasks with the DLR cable-Suspended Aerial Manipulator (SAM). As a result, we show the viability of the proposed system in future industrial applications.
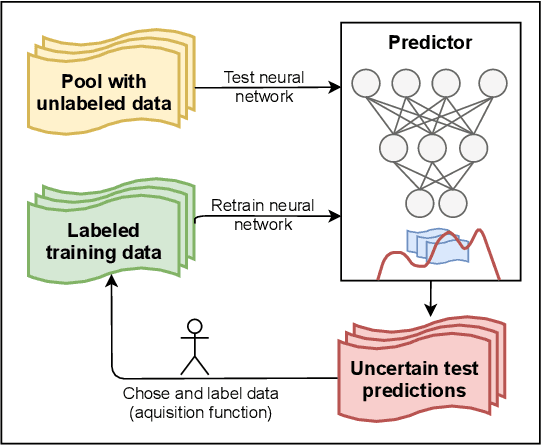
Bridging the Last Mile in Sim-to-Real Robot Perception via Bayesian Active Learning
Sep 29, 2021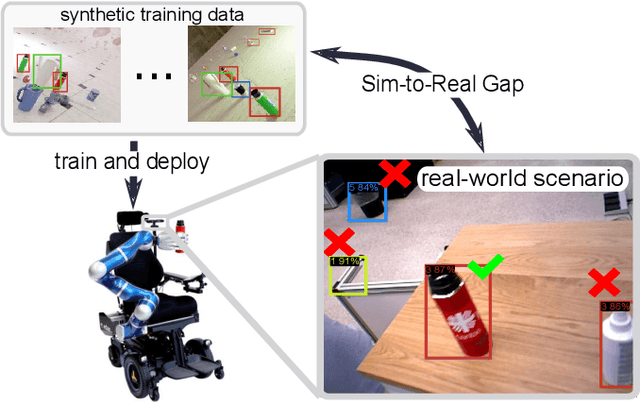
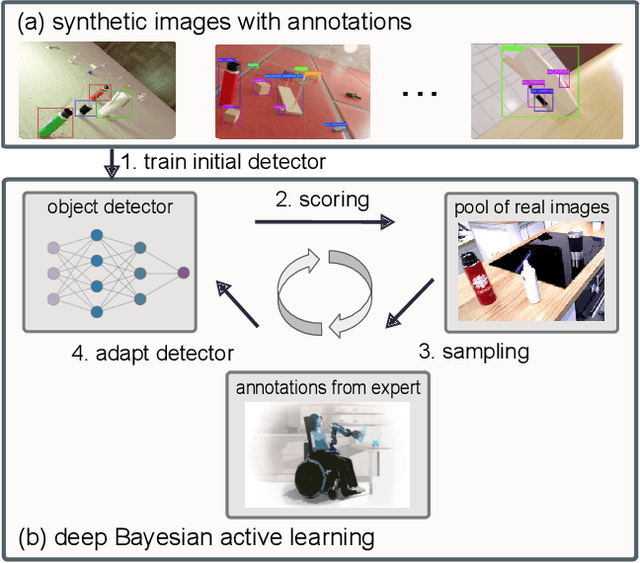
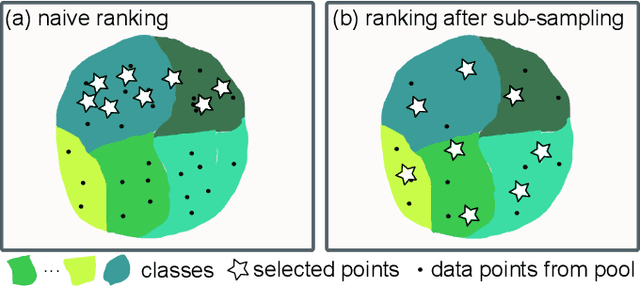
Learning from synthetic data is popular in a variety of robotic vision tasks such as object detection, because a large amount of data can be generated without annotations by humans. However, when relying only on synthetic data,we encounter the well-known problem of the simulation-to-reality (Sim-to-Real) gap, which is hard to resolve completely in practice. For such cases, real human-annotated data is necessary to bridge this gap, and in our work we focus on howto acquire this data efficiently. Therefore, we propose a Sim-to-Real pipeline that relies on deep Bayesian active learning and aims to minimize the manual annotation efforts. We devise a learning paradigm that autonomously selects the data that is considered useful for the human expert to annotate. To achieve this, a Bayesian Neural Network (BNN) object detector providing reliable uncertain estimates is adapted to infer the informativeness of the unlabeled data, in order to perform active learning. In our experiments on two object detection data sets, we show that the labeling effort required to bridge the reality gap can be reduced to a small amount. Furthermore, we demonstrate the practical effectiveness of this idea in a grasping task on an assistive robot.
Trust Your Robots! Predictive Uncertainty Estimation of Neural Networks with Sparse Gaussian Processes
Sep 21, 2021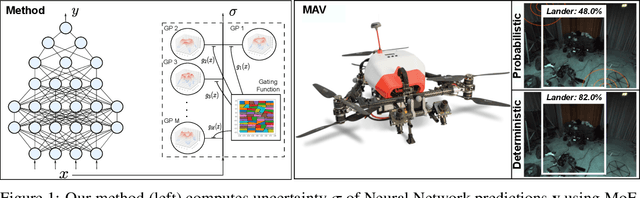
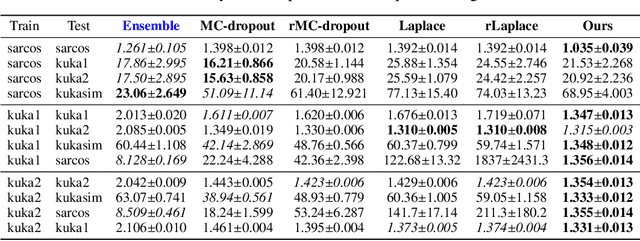
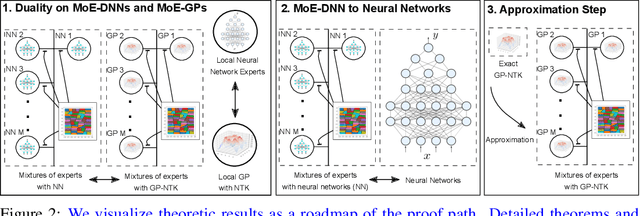
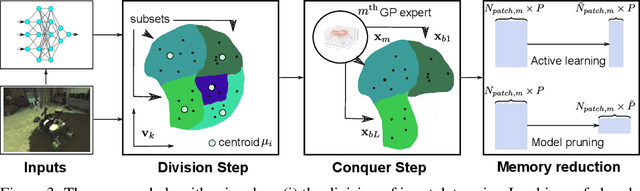
This paper presents a probabilistic framework to obtain both reliable and fast uncertainty estimates for predictions with Deep Neural Networks (DNNs). Our main contribution is a practical and principled combination of DNNs with sparse Gaussian Processes (GPs). We prove theoretically that DNNs can be seen as a special case of sparse GPs, namely mixtures of GP experts (MoE-GP), and we devise a learning algorithm that brings the derived theory into practice. In experiments from two different robotic tasks -- inverse dynamics of a manipulator and object detection on a micro-aerial vehicle (MAV) -- we show the effectiveness of our approach in terms of predictive uncertainty, improved scalability, and run-time efficiency on a Jetson TX2. We thus argue that our approach can pave the way towards reliable and fast robot learning systems with uncertainty awareness.
A Survey of Uncertainty in Deep Neural Networks
Jul 07, 2021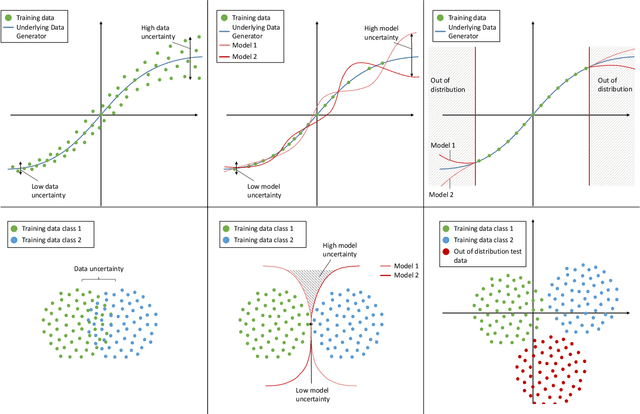
Due to their increasing spread, confidence in neural network predictions became more and more important. However, basic neural networks do not deliver certainty estimates or suffer from over or under confidence. Many researchers have been working on understanding and quantifying uncertainty in a neural network's prediction. As a result, different types and sources of uncertainty have been identified and a variety of approaches to measure and quantify uncertainty in neural networks have been proposed. This work gives a comprehensive overview of uncertainty estimation in neural networks, reviews recent advances in the field, highlights current challenges, and identifies potential research opportunities. It is intended to give anyone interested in uncertainty estimation in neural networks a broad overview and introduction, without presupposing prior knowledge in this field. A comprehensive introduction to the most crucial sources of uncertainty is given and their separation into reducible model uncertainty and not reducible data uncertainty is presented. The modeling of these uncertainties based on deterministic neural networks, Bayesian neural networks, ensemble of neural networks, and test-time data augmentation approaches is introduced and different branches of these fields as well as the latest developments are discussed. For a practical application, we discuss different measures of uncertainty, approaches for the calibration of neural networks and give an overview of existing baselines and implementations. Different examples from the wide spectrum of challenges in different fields give an idea of the needs and challenges regarding uncertainties in practical applications. Additionally, the practical limitations of current methods for mission- and safety-critical real world applications are discussed and an outlook on the next steps towards a broader usage of such methods is given.
Bayesian Optimization Meets Laplace Approximation for Robotic Introspection
Oct 30, 2020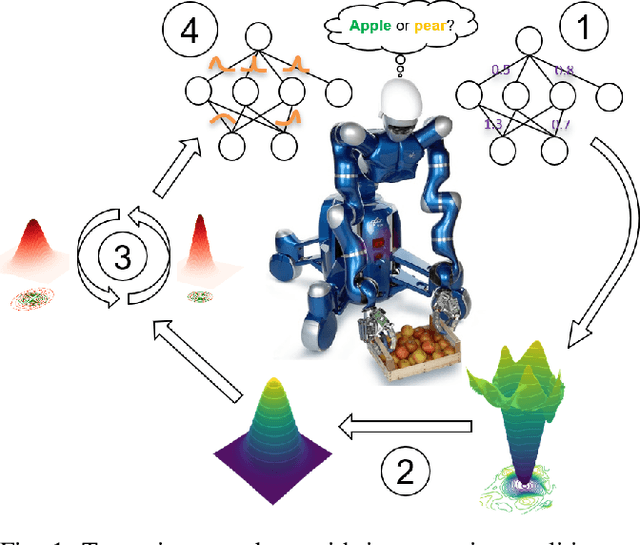
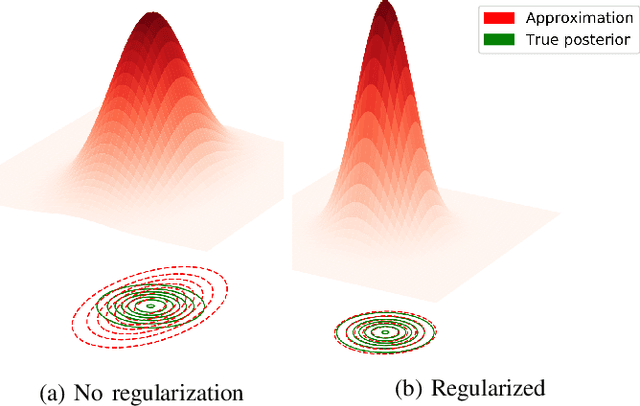
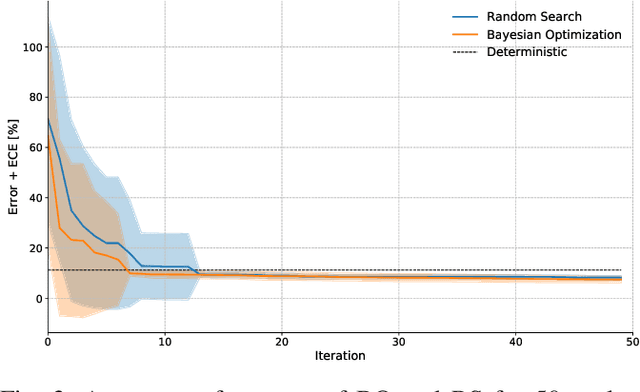
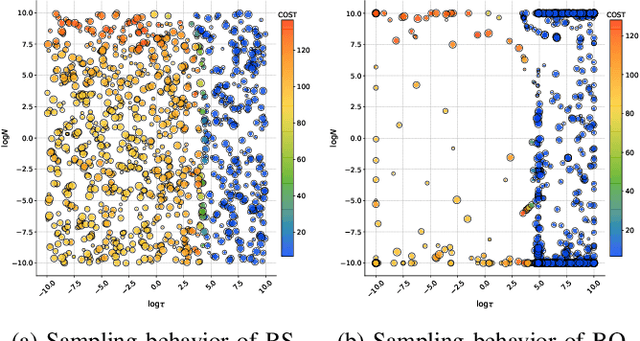
In robotics, deep learning (DL) methods are used more and more widely, but their general inability to provide reliable confidence estimates will ultimately lead to fragile and unreliable systems. This impedes the potential deployments of DL methods for long-term autonomy. Therefore, in this paper we introduce a scalable Laplace Approximation (LA) technique to make Deep Neural Networks (DNNs) more introspective, i.e. to enable them to provide accurate assessments of their failure probability for unseen test data. In particular, we propose a novel Bayesian Optimization (BO) algorithm to mitigate their tendency of under-fitting the true weight posterior, so that both the calibration and the accuracy of the predictions can be simultaneously optimized. We demonstrate empirically that the proposed BO approach requires fewer iterations for this when compared to random search, and we show that the proposed framework can be scaled up to large datasets and architectures.
Learning Multiplicative Interactions with Bayesian Neural Networks for Visual-Inertial Odometry
Jul 15, 2020
This paper presents an end-to-end multi-modal learning approach for monocular Visual-Inertial Odometry (VIO), which is specifically designed to exploit sensor complementarity in the light of sensor degradation scenarios. The proposed network makes use of a multi-head self-attention mechanism that learns multiplicative interactions between multiple streams of information. Another design feature of our approach is the incorporation of the model uncertainty using scalable Laplace Approximation. We evaluate the performance of the proposed approach by comparing it against the end-to-end state-of-the-art methods on the KITTI dataset and show that it achieves superior performance. Importantly, our work thereby provides an empirical evidence that learning multiplicative interactions can result in a powerful inductive bias for increased robustness to sensor failures.