 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIt's a (Blind) Match! Towards Vision-Language Correspondence without Parallel Data
Mar 31, 2025The platonic representation hypothesis suggests that vision and language embeddings become more homogeneous as model and dataset sizes increase. In particular, pairwise distances within each modality become more similar. This suggests that as foundation models mature, it may become possible to match vision and language embeddings in a fully unsupervised fashion, i.e. without parallel data. We present the first feasibility study, and investigate conformity of existing vision and language foundation models in the context of unsupervised, or "blind", matching. First, we formulate unsupervised matching as a quadratic assignment problem and introduce a novel heuristic that outperforms previous solvers. We also develop a technique to find optimal matching problems, for which a non-trivial match is very likely. Second, we conduct an extensive study deploying a range of vision and language models on four datasets. Our analysis reveals that for many problem instances, vision and language representations can be indeed matched without supervision. This finding opens up the exciting possibility of embedding semantic knowledge into other modalities virtually annotation-free. As a proof of concept, we showcase an unsupervised classifier, which achieves non-trivial classification accuracy without any image-text annotation.
Learning Expressive Priors for Generalization and Uncertainty Estimation in Neural Networks
Jul 15, 2023


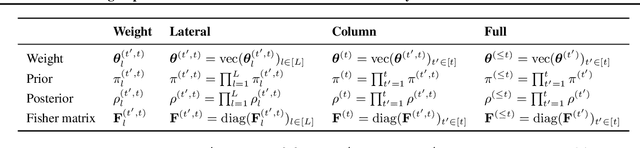
In this work, we propose a novel prior learning method for advancing generalization and uncertainty estimation in deep neural networks. The key idea is to exploit scalable and structured posteriors of neural networks as informative priors with generalization guarantees. Our learned priors provide expressive probabilistic representations at large scale, like Bayesian counterparts of pre-trained models on ImageNet, and further produce non-vacuous generalization bounds. We also extend this idea to a continual learning framework, where the favorable properties of our priors are desirable. Major enablers are our technical contributions: (1) the sums-of-Kronecker-product computations, and (2) the derivations and optimizations of tractable objectives that lead to improved generalization bounds. Empirically, we exhaustively show the effectiveness of this method for uncertainty estimation and generalization.