 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Multiplicative Interactions with Bayesian Neural Networks for Visual-Inertial Odometry
Jul 15, 2020
This paper presents an end-to-end multi-modal learning approach for monocular Visual-Inertial Odometry (VIO), which is specifically designed to exploit sensor complementarity in the light of sensor degradation scenarios. The proposed network makes use of a multi-head self-attention mechanism that learns multiplicative interactions between multiple streams of information. Another design feature of our approach is the incorporation of the model uncertainty using scalable Laplace Approximation. We evaluate the performance of the proposed approach by comparing it against the end-to-end state-of-the-art methods on the KITTI dataset and show that it achieves superior performance. Importantly, our work thereby provides an empirical evidence that learning multiplicative interactions can result in a powerful inductive bias for increased robustness to sensor failures.
Visual-Inertial Telepresence for Aerial Manipulation
Mar 25, 2020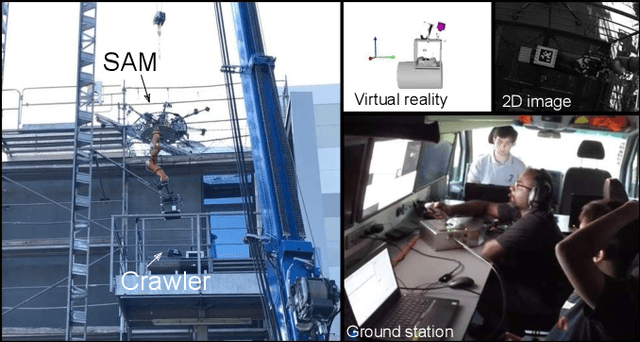
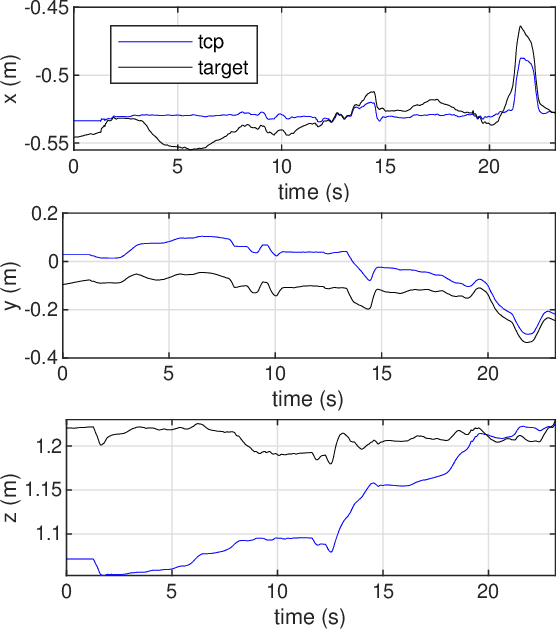
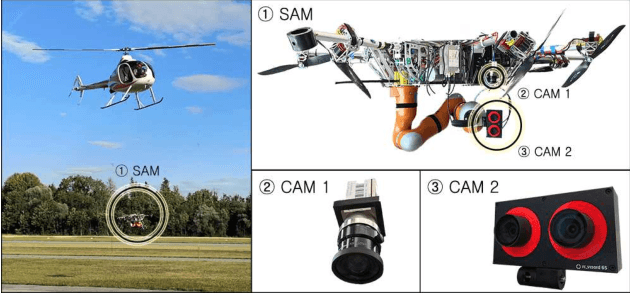

This paper presents a novel telepresence system for enhancing aerial manipulation capabilities. It involves not only a haptic device, but also a virtual reality that provides a 3D visual feedback to a remotely-located teleoperator in real-time. We achieve this by utilizing onboard visual and inertial sensors, an object tracking algorithm and a pre-generated object database. As the virtual reality has to closely match the real remote scene, we propose an extension of a marker tracking algorithm with visual-inertial odometry. Both indoor and outdoor experiments show benefits of our proposed system in achieving advanced aerial manipulation tasks, namely grasping, placing, force exertion and peg-in-hole insertion.