 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Rating-Based Reinforcement Learning to Effectively Leverage Feedback from Large Vision-Language Models
Jun 15, 2025



Designing effective reward functions remains a fundamental challenge in reinforcement learning (RL), as it often requires extensive human effort and domain expertise. While RL from human feedback has been successful in aligning agents with human intent, acquiring high-quality feedback is costly and labor-intensive, limiting its scalability. Recent advancements in foundation models present a promising alternative--leveraging AI-generated feedback to reduce reliance on human supervision in reward learning. Building on this paradigm, we introduce ERL-VLM, an enhanced rating-based RL method that effectively learns reward functions from AI feedback. Unlike prior methods that rely on pairwise comparisons, ERL-VLM queries large vision-language models (VLMs) for absolute ratings of individual trajectories, enabling more expressive feedback and improved sample efficiency. Additionally, we propose key enhancements to rating-based RL, addressing instability issues caused by data imbalance and noisy labels. Through extensive experiments across both low-level and high-level control tasks, we demonstrate that ERL-VLM significantly outperforms existing VLM-based reward generation methods. Our results demonstrate the potential of AI feedback for scaling RL with minimal human intervention, paving the way for more autonomous and efficient reward learning.
CDM: Contact Diffusion Model for Multi-Contact Point Localization
Feb 10, 2025In this paper, we propose a Contact Diffusion Model (CDM), a novel learning-based approach for multi-contact point localization. We consider a robot equipped with joint torque sensors and a force/torque sensor at the base. By leveraging a diffusion model, CDM addresses the singularity where multiple pairs of contact points and forces produce identical sensor measurements. We formulate CDM to be conditioned on past model outputs to account for the time-dependent characteristics of the multi-contact scenarios. Moreover, to effectively address the complex shape of the robot surfaces, we incorporate the signed distance field in the denoising process. Consequently, CDM can localize contacts at arbitrary locations with high accuracy. Simulation and real-world experiments demonstrate the effectiveness of the proposed method. In particular, CDM operates at 15.97ms and, in the real world, achieves an error of 0.44cm in single-contact scenarios and 1.24cm in dual-contact scenarios.
SPLIT: SE(3)-diffusion via Local Geometry-based Score Prediction for 3D Scene-to-Pose-Set Matching Problems
Nov 15, 2024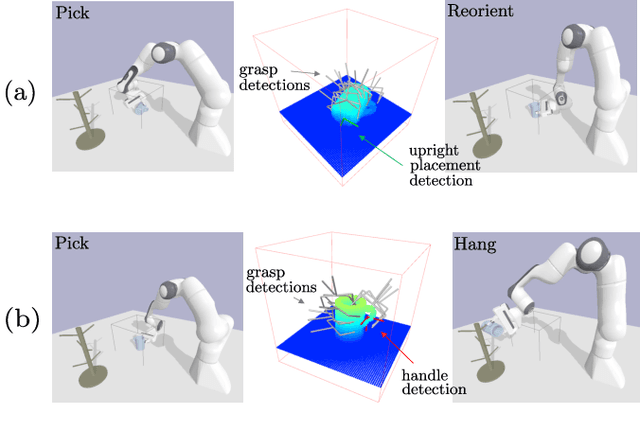
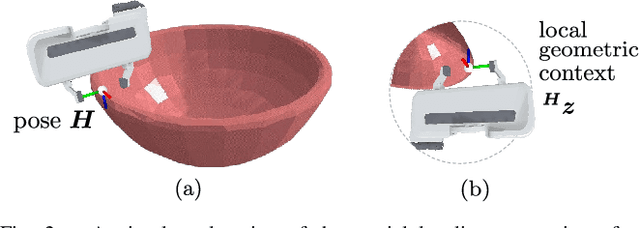
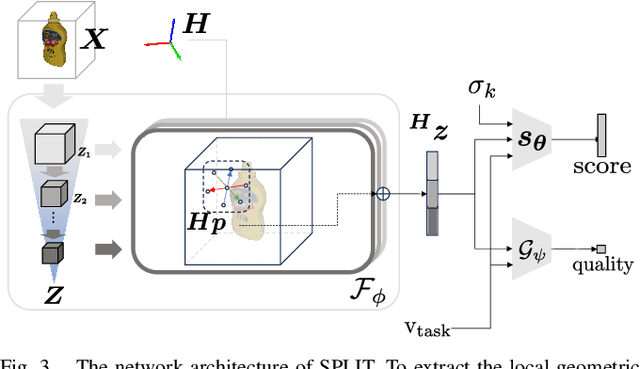
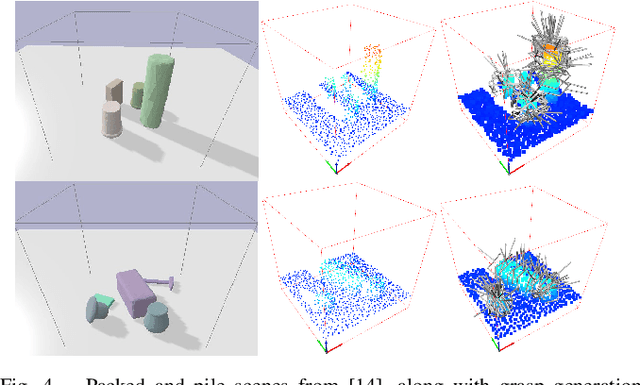
To enable versatile robot manipulation, robots must detect task-relevant poses for different purposes from raw scenes. Currently, many perception algorithms are designed for specific purposes, which limits the flexibility of the perception module. We present a general problem formulation called 3D scene-to-pose-set matching, which directly matches the corresponding poses from the scene without relying on task-specific heuristics. To address this, we introduce SPLIT, an SE(3)-diffusion model for generating pose samples from a scene. The model's efficiency comes from predicting scores based on local geometry with respect to the sample pose. Moreover, leveraging the conditioned generation capability of diffusion models, we demonstrate that SPLIT can generate the multi-purpose poses, required to complete both the mug reorientation and hanging manipulation within a single model.
Online Multi-Contact Feedback Model Predictive Control for Interactive Robotic Tasks
Mar 13, 2024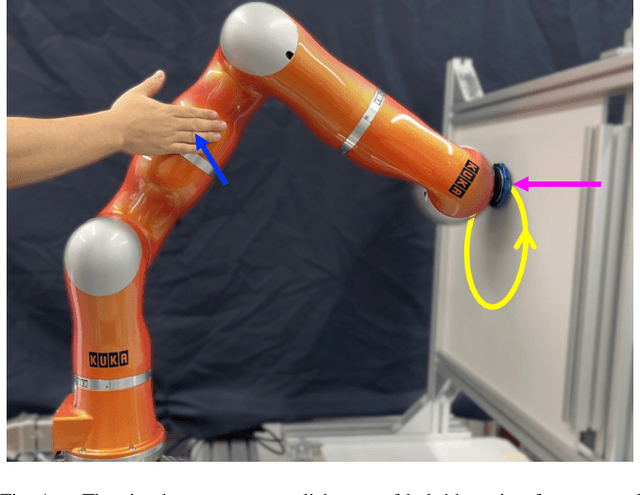

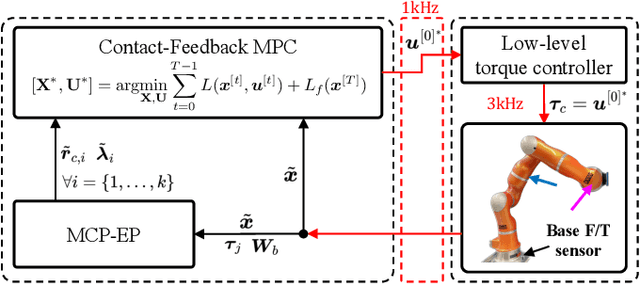

In this paper, we propose a model predictive control (MPC) that accomplishes interactive robotic tasks, in which multiple contacts may occur at unknown locations. To address such scenarios, we made an explicit contact feedback loop in the MPC framework. An algorithm called Multi-Contact Particle Filter with Exploration Particle (MCP-EP) is employed to establish real-time feedback of multi-contact information. Then the interaction locations and forces are accommodated in the MPC framework via a spring contact model. Moreover, we achieved real-time control for a 7 degrees of freedom robot without any simplifying assumptions by employing a Differential-Dynamic-Programming algorithm. We achieved 6.8kHz, 1.9kHz, and 1.8kHz update rates of the MPC for 0, 1, and 2 contacts, respectively. This allows the robot to handle unexpected contacts in real time. Real-world experiments show the effectiveness of the proposed method in various scenarios.
Hierarchical Whole-body Control of the cable-Suspended Aerial Manipulator endowed with Winch-based Actuation
May 25, 2023



During operation, aerial manipulation systems are affected by various disturbances. Among them is a gravitational torque caused by the weight of the robotic arm. Common propeller-based actuation is ineffective against such disturbances because of possible overheating and high power consumption. To overcome this issue, in this paper we propose a winchbased actuation for the crane-stationed cable-suspended aerial manipulator. Three winch-controlled suspension rigging cables produce a desired cable tension distribution to generate a wrench that reduces the effect of gravitational torque. In order to coordinate the robotic arm and the winch-based actuation, a model-based hierarchical whole-body controller is adapted. It resolves two tasks: keeping the robotic arm end-effector at the desired pose and shifting the system center of mass in the location with zero gravitational torque. The performance of the introduced actuation system as well as control strategy is validated through experimental studies.
Passivity-based Decentralized Control for Collaborative Grasping of Under-Actuated Aerial Manipulators
Mar 19, 2023This paper proposes a decentralized passive impedance control scheme for collaborative grasping using under-actuated aerial manipulators (AMs). The AM system is formulated, using a proper coordinate transformation, as an inertially decoupled dynamics with which a passivity-based control design is conducted. Since the interaction for grasping can be interpreted as a feedback interconnection of passive systems, an arbitrary number of AMs can be modularly combined, leading to a decentralized control scheme. Another interesting consequence of the passivity property is that the AMs automatically converge to a certain configuration to accomplish the grasping. Collaborative grasping using 10 AMs is presented in simulation.
A Reachability Tree-Based Algorithm for Robot Task and Motion Planning
Mar 07, 2023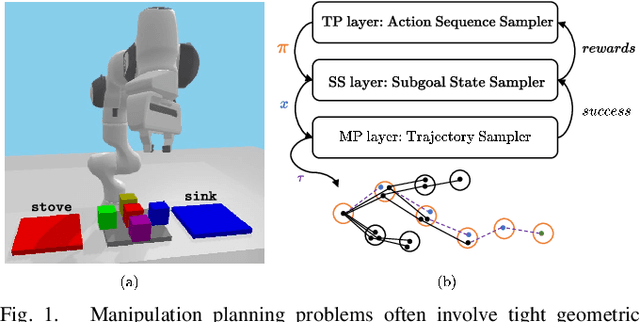
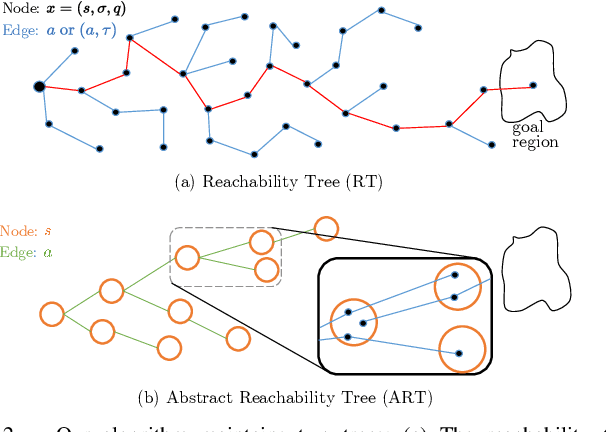
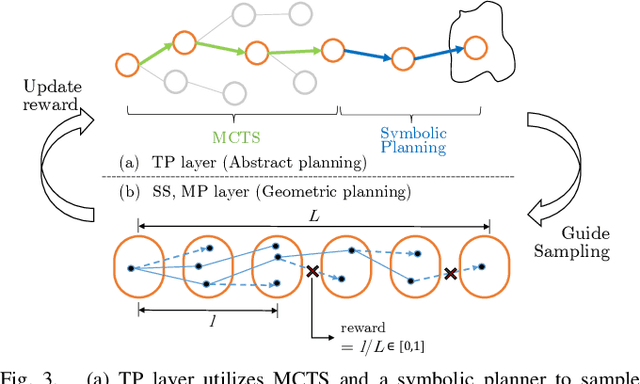
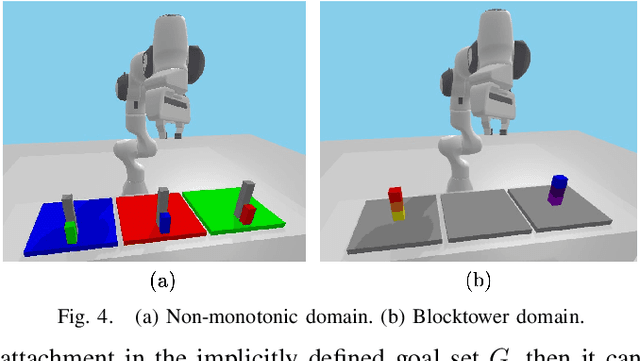
This paper presents a novel algorithm for robot task and motion planning (TAMP) problems by utilizing a reachability tree. While tree-based algorithms are known for their speed and simplicity in motion planning (MP), they are not well-suited for TAMP problems that involve both abstracted and geometrical state variables. To address this challenge, we propose a hierarchical sampling strategy, which first generates an abstracted task plan using Monte Carlo tree search (MCTS) and then fills in the details with a geometrically feasible motion trajectory. Moreover, we show that the performance of the proposed method can be significantly enhanced by selecting an appropriate reward for MCTS and by using a pre-generated goal state that is guaranteed to be geometrically feasible. A comparative study using TAMP benchmark problems demonstrates the effectiveness of the proposed approach.
Proprioceptive Sensor-Based Simultaneous Multi-Contact Point Localization and Force Identification for Robotic Arms
Mar 07, 2023In this paper, we propose an algorithm that estimates contact point and force simultaneously. We consider a collaborative robot equipped with proprioceptive sensors, in particular, joint torque sensors (JTSs) and a base force/torque (F/T) sensor. The proposed method has the following advantages. First, fast computation is achieved by proper preprocessing of robot meshes. Second, multi-contact can be identified with the aid of the base F/T sensor, while this is challenging when the robot is equipped with only JTSs. The proposed method is a modification of the standard particle filter to cope with mesh preprocessing and with available sensor data. In simulation validation, for a 7 degree-of-freedom robot, the algorithm runs at 2200Hz with 99.96% success rate for the single-contact case. In terms of the run-time, the proposed method was >=3.5X faster compared to the existing methods. Dual and triple contacts are also reported in the manuscript.
Enumeration of Polyominoes & Polycubes Composed of Magnetic Cubes
Jul 21, 2021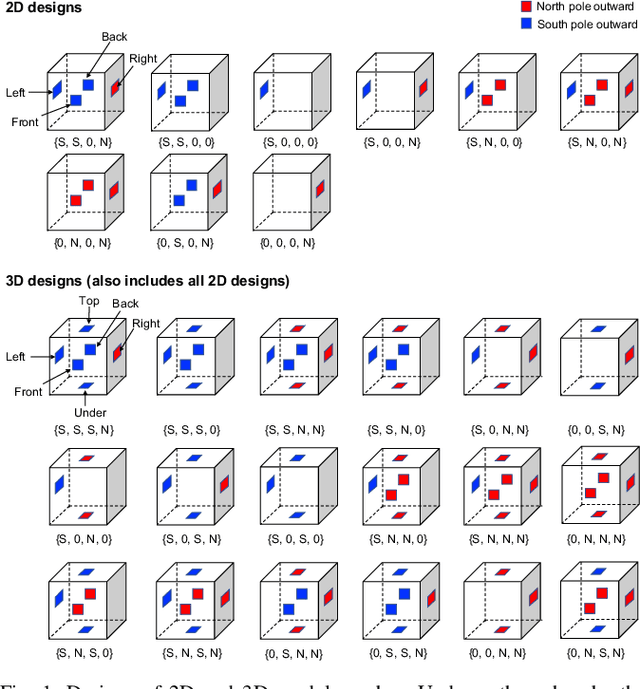
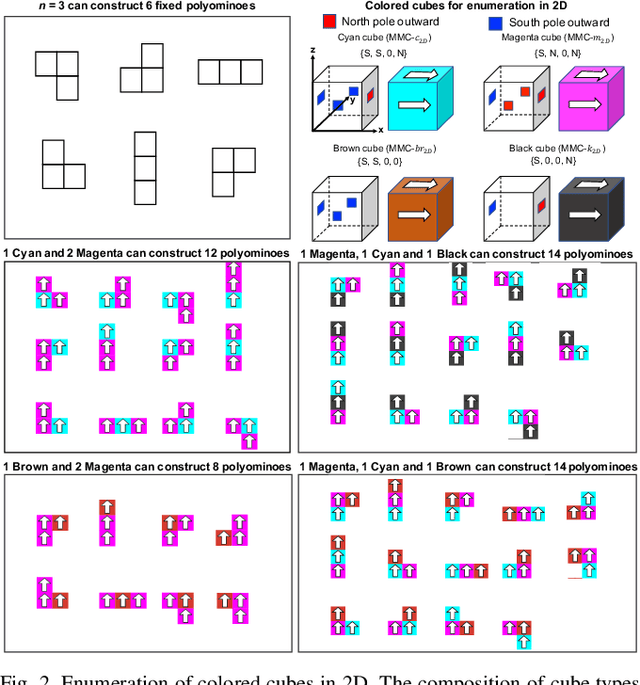
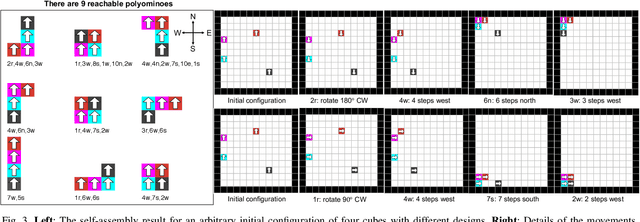
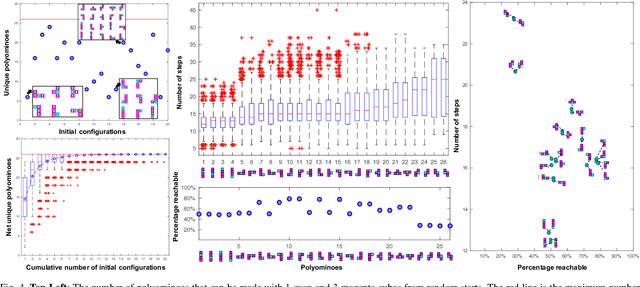
This paper examines a family of designs for magnetic cubes and counts how many configurations are possible for each design as a function of the number of modules. Magnetic modular cubes are cubes with magnets arranged on their faces. The magnets are positioned so that each face has either magnetic south or north pole outward. Moreover, we require that the net magnetic moment of the cube passes through the center of opposing faces. These magnetic arrangements enable coupling when cube faces with opposite polarity are brought in close proximity and enable moving the cubes by controlling the orientation of a global magnetic field. This paper investigates the 2D and 3D shapes that can be constructed by magnetic modular cubes, and describes all possible magnet arrangements that obey these rules. We select ten magnetic arrangements and assign a "colo"' to each of them for ease of visualization and reference. We provide a method to enumerate the number of unique polyominoes and polycubes that can be constructed from a given set of colored cubes. We use this method to enumerate all arrangements for up to 20 modules in 2D and 16 modules in 3D. We provide a motion planner for 2D assembly and through simulations compare which arrangements require fewer movements to generate and which arrangements are more common. Hardware demonstrations explore the self-assembly and disassembly of these modules in 2D and 3D.
Visual-Inertial Telepresence for Aerial Manipulation
Mar 25, 2020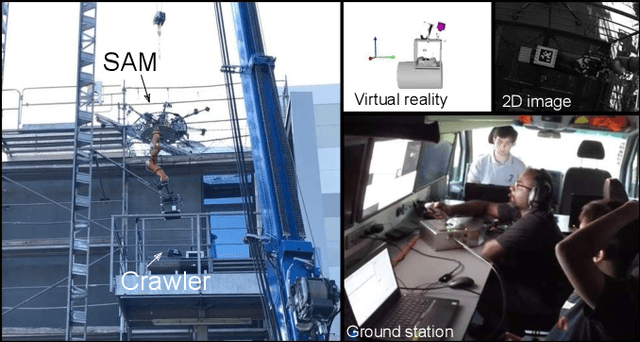
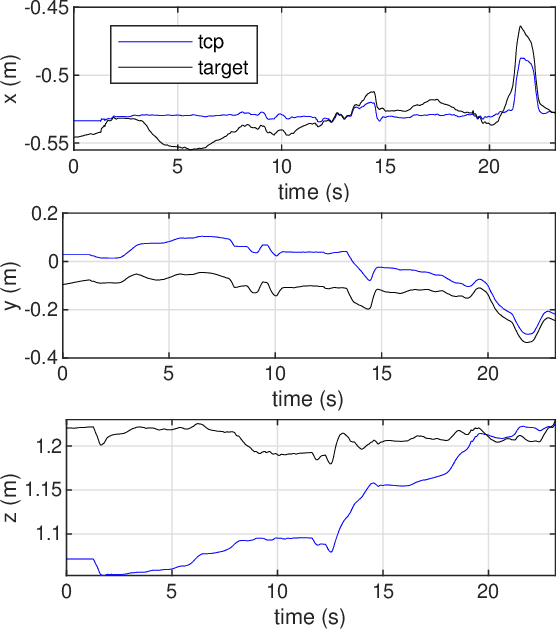
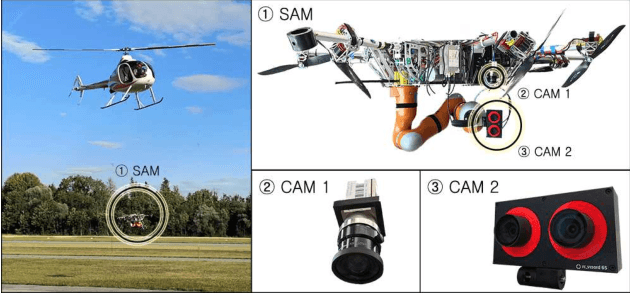

This paper presents a novel telepresence system for enhancing aerial manipulation capabilities. It involves not only a haptic device, but also a virtual reality that provides a 3D visual feedback to a remotely-located teleoperator in real-time. We achieve this by utilizing onboard visual and inertial sensors, an object tracking algorithm and a pre-generated object database. As the virtual reality has to closely match the real remote scene, we propose an extension of a marker tracking algorithm with visual-inertial odometry. Both indoor and outdoor experiments show benefits of our proposed system in achieving advanced aerial manipulation tasks, namely grasping, placing, force exertion and peg-in-hole insertion.