 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCDM: Contact Diffusion Model for Multi-Contact Point Localization
Feb 10, 2025In this paper, we propose a Contact Diffusion Model (CDM), a novel learning-based approach for multi-contact point localization. We consider a robot equipped with joint torque sensors and a force/torque sensor at the base. By leveraging a diffusion model, CDM addresses the singularity where multiple pairs of contact points and forces produce identical sensor measurements. We formulate CDM to be conditioned on past model outputs to account for the time-dependent characteristics of the multi-contact scenarios. Moreover, to effectively address the complex shape of the robot surfaces, we incorporate the signed distance field in the denoising process. Consequently, CDM can localize contacts at arbitrary locations with high accuracy. Simulation and real-world experiments demonstrate the effectiveness of the proposed method. In particular, CDM operates at 15.97ms and, in the real world, achieves an error of 0.44cm in single-contact scenarios and 1.24cm in dual-contact scenarios.
Online Multi-Contact Feedback Model Predictive Control for Interactive Robotic Tasks
Mar 13, 2024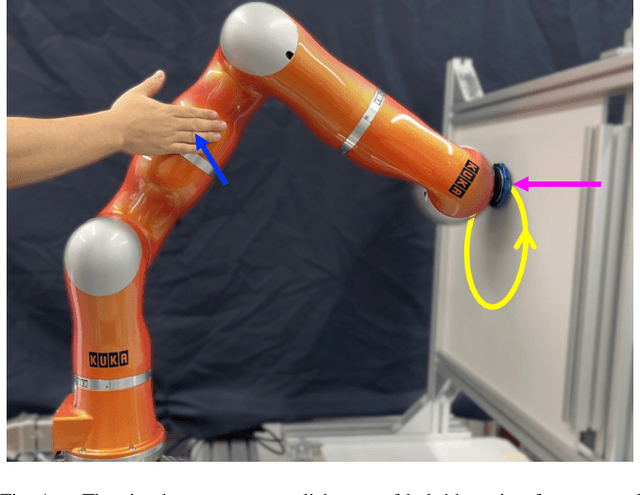

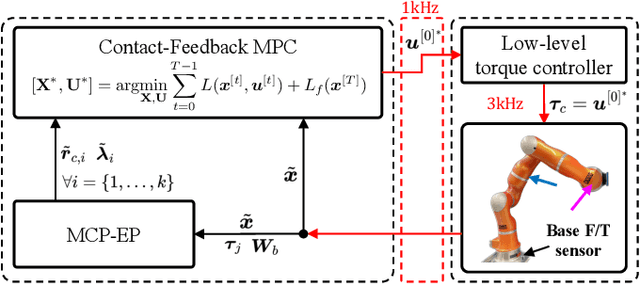

In this paper, we propose a model predictive control (MPC) that accomplishes interactive robotic tasks, in which multiple contacts may occur at unknown locations. To address such scenarios, we made an explicit contact feedback loop in the MPC framework. An algorithm called Multi-Contact Particle Filter with Exploration Particle (MCP-EP) is employed to establish real-time feedback of multi-contact information. Then the interaction locations and forces are accommodated in the MPC framework via a spring contact model. Moreover, we achieved real-time control for a 7 degrees of freedom robot without any simplifying assumptions by employing a Differential-Dynamic-Programming algorithm. We achieved 6.8kHz, 1.9kHz, and 1.8kHz update rates of the MPC for 0, 1, and 2 contacts, respectively. This allows the robot to handle unexpected contacts in real time. Real-world experiments show the effectiveness of the proposed method in various scenarios.
Proprioceptive Sensor-Based Simultaneous Multi-Contact Point Localization and Force Identification for Robotic Arms
Mar 07, 2023In this paper, we propose an algorithm that estimates contact point and force simultaneously. We consider a collaborative robot equipped with proprioceptive sensors, in particular, joint torque sensors (JTSs) and a base force/torque (F/T) sensor. The proposed method has the following advantages. First, fast computation is achieved by proper preprocessing of robot meshes. Second, multi-contact can be identified with the aid of the base F/T sensor, while this is challenging when the robot is equipped with only JTSs. The proposed method is a modification of the standard particle filter to cope with mesh preprocessing and with available sensor data. In simulation validation, for a 7 degree-of-freedom robot, the algorithm runs at 2200Hz with 99.96% success rate for the single-contact case. In terms of the run-time, the proposed method was >=3.5X faster compared to the existing methods. Dual and triple contacts are also reported in the manuscript.