 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Robotic Friction Learning via Symbolic Regression
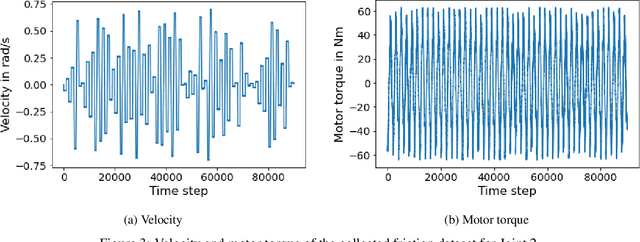
May 19, 2025Accurately modeling the friction torque in robotic joints has long been challenging due to the request for a robust mathematical description. Traditional model-based approaches are often labor-intensive, requiring extensive experiments and expert knowledge, and they are difficult to adapt to new scenarios and dependencies. On the other hand, data-driven methods based on neural networks are easier to implement but often lack robustness, interpretability, and trustworthiness--key considerations for robotic hardware and safety-critical applications such as human-robot interaction. To address the limitations of both approaches, we propose the use of symbolic regression (SR) to estimate the friction torque. SR generates interpretable symbolic formulas similar to those produced by model-based methods while being flexible to accommodate various dynamic effects and dependencies. In this work, we apply SR algorithms to approximate the friction torque using collected data from a KUKA LWR-IV+ robot. Our results show that SR not only yields formulas with comparable complexity to model-based approaches but also achieves higher accuracy. Moreover, SR-derived formulas can be seamlessly extended to include load dependencies and other dynamic factors.
Stronger Than You Think: Benchmarking Weak Supervision on Realistic Tasks
Jan 13, 2025Weak supervision (WS) is a popular approach for label-efficient learning, leveraging diverse sources of noisy but inexpensive weak labels to automatically annotate training data. Despite its wide usage, WS and its practical value are challenging to benchmark due to the many knobs in its setup, including: data sources, labeling functions (LFs), aggregation techniques (called label models), and end model pipelines. Existing evaluation suites tend to be limited, focusing on particular components or specialized use cases. Moreover, they often involve simplistic benchmark tasks or de-facto LF sets that are suboptimally written, producing insights that may not generalize to real-world settings. We address these limitations by introducing a new benchmark, BOXWRENCH, designed to more accurately reflect real-world usages of WS. This benchmark features tasks with (1) higher class cardinality and imbalance, (2) notable domain expertise requirements, and (3) multilingual variations across parallel corpora. For all tasks, LFs are written using a careful procedure aimed at mimicking real-world settings. In contrast to existing WS benchmarks, we show that supervised learning requires substantial amounts (1000+) of labeled examples to match WS in many settings.
Online Multi-Contact Feedback Model Predictive Control for Interactive Robotic Tasks
Mar 13, 2024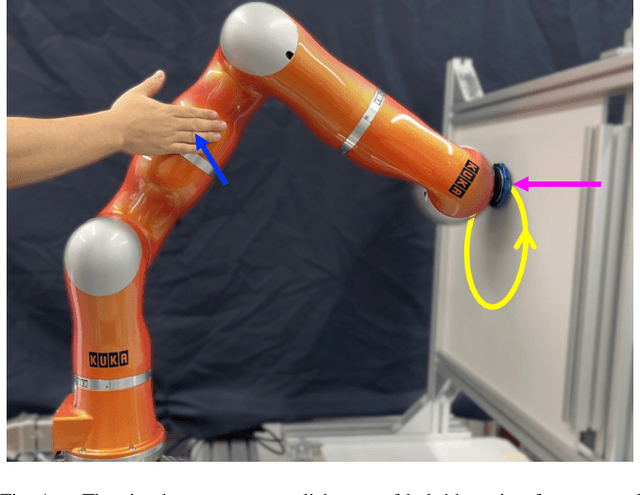

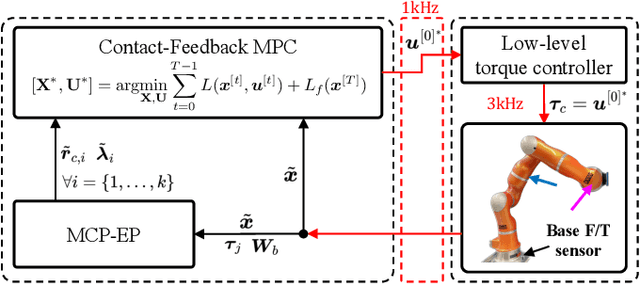

In this paper, we propose a model predictive control (MPC) that accomplishes interactive robotic tasks, in which multiple contacts may occur at unknown locations. To address such scenarios, we made an explicit contact feedback loop in the MPC framework. An algorithm called Multi-Contact Particle Filter with Exploration Particle (MCP-EP) is employed to establish real-time feedback of multi-contact information. Then the interaction locations and forces are accommodated in the MPC framework via a spring contact model. Moreover, we achieved real-time control for a 7 degrees of freedom robot without any simplifying assumptions by employing a Differential-Dynamic-Programming algorithm. We achieved 6.8kHz, 1.9kHz, and 1.8kHz update rates of the MPC for 0, 1, and 2 contacts, respectively. This allows the robot to handle unexpected contacts in real time. Real-world experiments show the effectiveness of the proposed method in various scenarios.
Learning-based adaption of robotic friction models
Oct 25, 2023
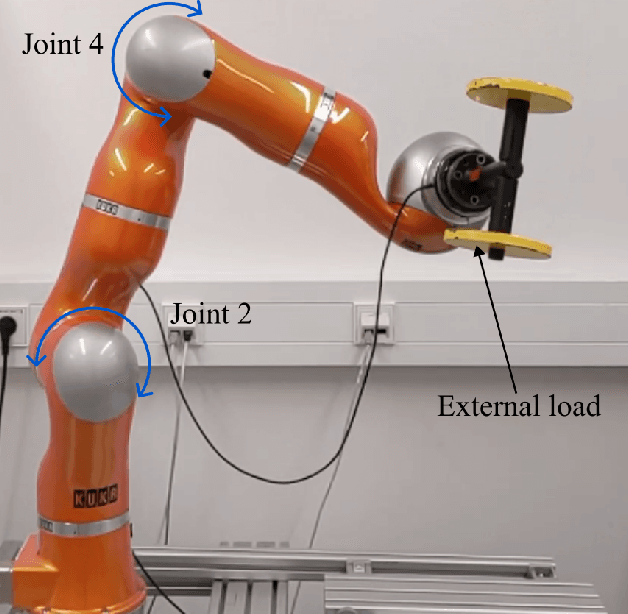
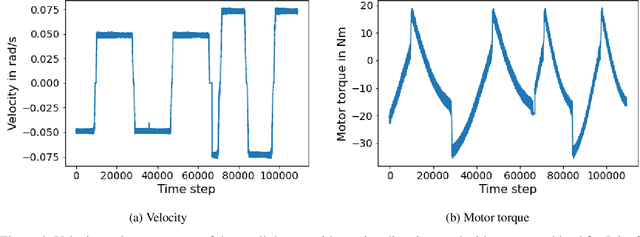
In the Fourth Industrial Revolution, wherein artificial intelligence and the automation of machines occupy a central role, the deployment of robots is indispensable. However, the manufacturing process using robots, especially in collaboration with humans, is highly intricate. In particular, modeling the friction torque in robotic joints is a longstanding problem due to the lack of a good mathematical description. This motivates the usage of data-driven methods in recent works. However, model-based and data-driven models often exhibit limitations in their ability to generalize beyond the specific dynamics they were trained on, as we demonstrate in this paper. To address this challenge, we introduce a novel approach based on residual learning, which aims to adapt an existing friction model to new dynamics using as little data as possible. We validate our approach by training a base neural network on a symmetric friction data set to learn an accurate relation between the velocity and the friction torque. Subsequently, to adapt to more complex asymmetric settings, we train a second network on a small dataset, focusing on predicting the residual of the initial network's output. By combining the output of both networks in a suitable manner, our proposed estimator outperforms the conventional model-based approach and the base neural network significantly. Furthermore, we evaluate our method on trajectories involving external loads and still observe a substantial improvement, approximately 60-70\%, over the conventional approach. Our method does not rely on data with external load during training, eliminating the need for external torque sensors. This demonstrates the generalization capability of our approach, even with a small amount of data-only 43 seconds of a robot movement-enabling adaptation to diverse scenarios based on prior knowledge about friction in different settings.
Towards Accurate Force Control of Series Elastic Actuators Exploiting a Robust Transmission Force Observer
Feb 14, 2019
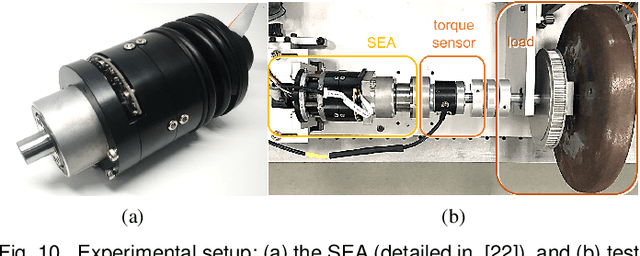
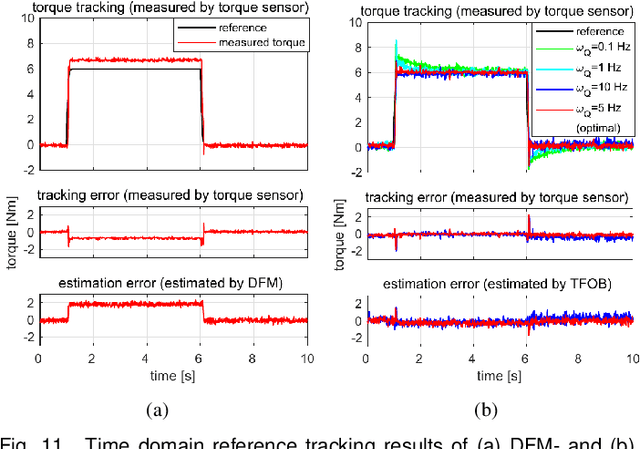
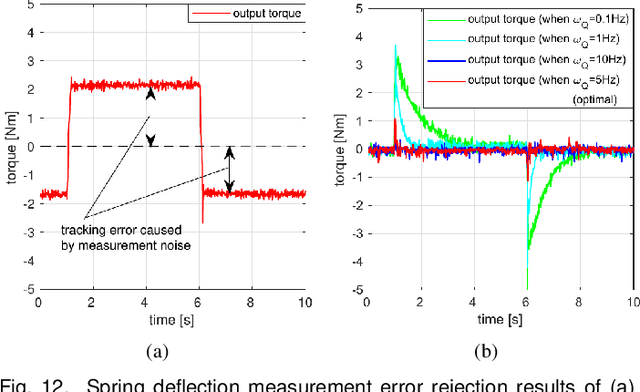
This paper develops an accurate force control algorithm for series elastic actuators (SEAs) based on a novel force estimation scheme, called transmission force observer (TFOB). The proposed method is designed to improve an inferior force measurement of the SEA caused by nonlinearities of the elastic transmission and measurement noise and error of its deformation sensor. This paper first analyzes the limitation of the conventional methods for the SEA transmission force sensing and then investigates its stochastic characteristics, which indeed provide the base to render the accurate force control performance incorporated with the TFOB. In particular, a tuning parameter is introduced from holistic closed-loop system analyses in the frequency domain. This gives a guideline to attain optimum performance of the force-controlled SEA system. The proposed algorithm is experimentally verified in an actual SEA hardware setup.
Center-of-Mass-Based Grasp Pose Adaptation Using 3D Range and Force/Torque Sensing
Feb 18, 2018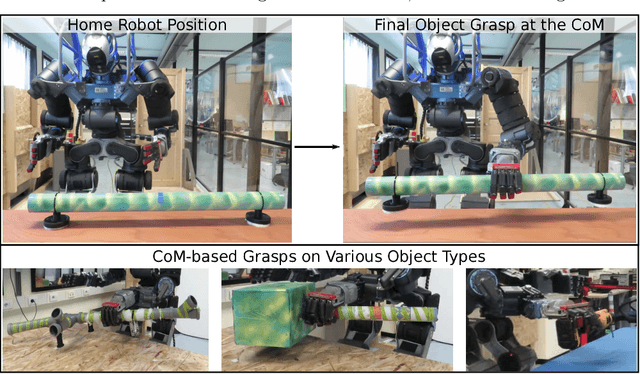


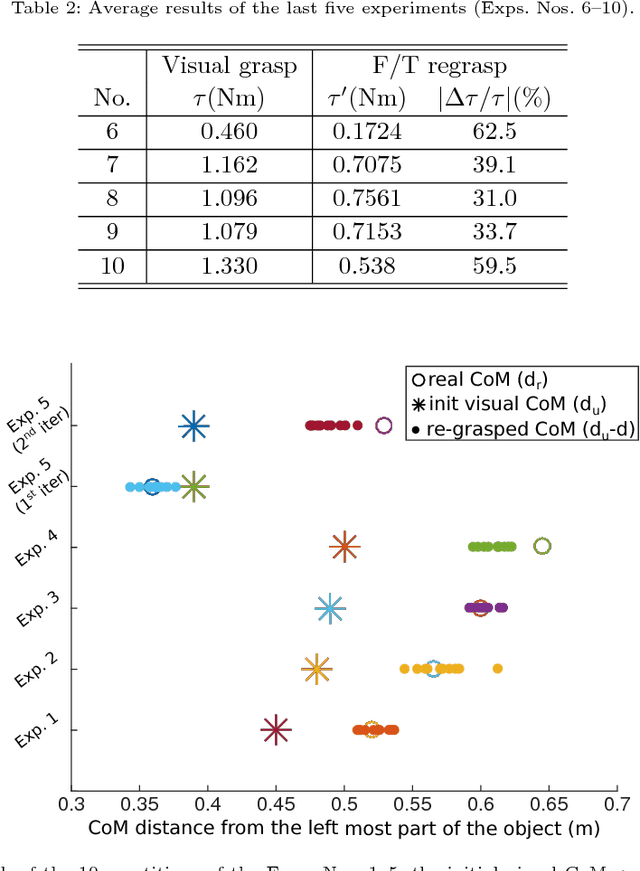
Lifting objects, whose mass may produce high wrist torques that exceed the hardware strength limits, could lead to unstable grasps or serious robot damage. This work introduces a new Center-of-Mass (CoM)-based grasp pose adaptation method, for picking up objects using a combination of exteroceptive 3D perception and proprioceptive force/torque sensor feedback. The method works in two iterative stages to provide reliable and wrist torque efficient grasps. Initially, a geometric object CoM is estimated from the input range data. In the first stage, a set of hand-size handle grasps are localized on the object and the closest to its CoM is selected for grasping. In the second stage, the object is lifted using a single arm, while the force and torque readings from the sensor on the wrist are monitored. Based on these readings, a displacement to the new CoM estimation is calculated. The object is released and the process is repeated until the wrist torque effort is minimized. The advantage of our method is the blending of both exteroceptive (3D range) and proprioceptive (force/torque) sensing for finding the grasp location that minimizes the wrist effort, potentially improving the reliability of the grasping and the subsequent manipulation task. We experimentally validate the proposed method by executing a number of tests on a set of objects that include handles, using the humanoid robot WALK-MAN.
* 25 pages, 10 figures, International Journal of Humanoid Robotics (IJHR)