 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Robotic Friction Learning via Symbolic Regression
May 19, 2025Accurately modeling the friction torque in robotic joints has long been challenging due to the request for a robust mathematical description. Traditional model-based approaches are often labor-intensive, requiring extensive experiments and expert knowledge, and they are difficult to adapt to new scenarios and dependencies. On the other hand, data-driven methods based on neural networks are easier to implement but often lack robustness, interpretability, and trustworthiness--key considerations for robotic hardware and safety-critical applications such as human-robot interaction. To address the limitations of both approaches, we propose the use of symbolic regression (SR) to estimate the friction torque. SR generates interpretable symbolic formulas similar to those produced by model-based methods while being flexible to accommodate various dynamic effects and dependencies. In this work, we apply SR algorithms to approximate the friction torque using collected data from a KUKA LWR-IV+ robot. Our results show that SR not only yields formulas with comparable complexity to model-based approaches but also achieves higher accuracy. Moreover, SR-derived formulas can be seamlessly extended to include load dependencies and other dynamic factors.
Learning-based adaption of robotic friction models
Oct 25, 2023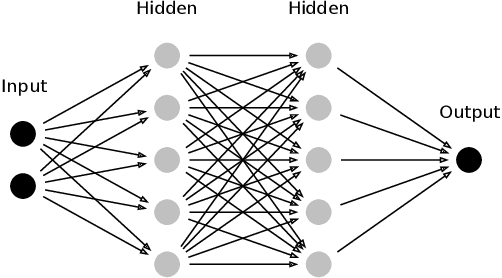
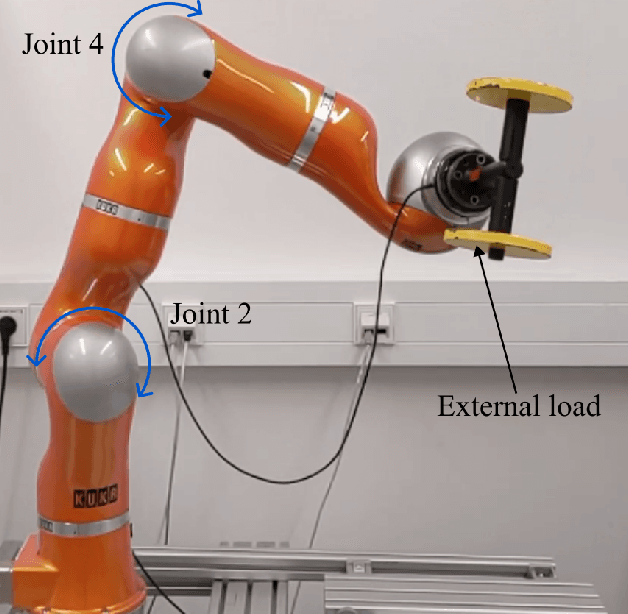
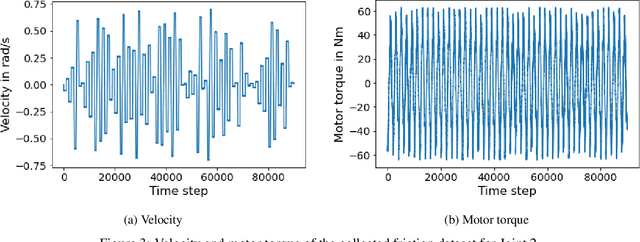
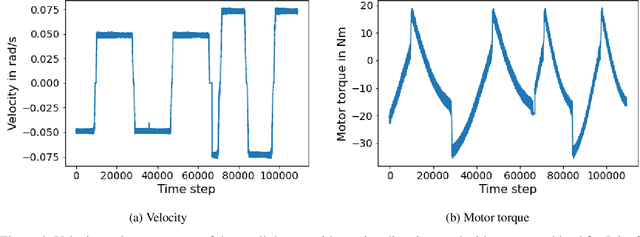
In the Fourth Industrial Revolution, wherein artificial intelligence and the automation of machines occupy a central role, the deployment of robots is indispensable. However, the manufacturing process using robots, especially in collaboration with humans, is highly intricate. In particular, modeling the friction torque in robotic joints is a longstanding problem due to the lack of a good mathematical description. This motivates the usage of data-driven methods in recent works. However, model-based and data-driven models often exhibit limitations in their ability to generalize beyond the specific dynamics they were trained on, as we demonstrate in this paper. To address this challenge, we introduce a novel approach based on residual learning, which aims to adapt an existing friction model to new dynamics using as little data as possible. We validate our approach by training a base neural network on a symmetric friction data set to learn an accurate relation between the velocity and the friction torque. Subsequently, to adapt to more complex asymmetric settings, we train a second network on a small dataset, focusing on predicting the residual of the initial network's output. By combining the output of both networks in a suitable manner, our proposed estimator outperforms the conventional model-based approach and the base neural network significantly. Furthermore, we evaluate our method on trajectories involving external loads and still observe a substantial improvement, approximately 60-70\%, over the conventional approach. Our method does not rely on data with external load during training, eliminating the need for external torque sensors. This demonstrates the generalization capability of our approach, even with a small amount of data-only 43 seconds of a robot movement-enabling adaptation to diverse scenarios based on prior knowledge about friction in different settings.
Care3D: An Active 3D Object Detection Dataset of Real Robotic-Care Environments
Oct 09, 2023



As labor shortage increases in the health sector, the demand for assistive robotics grows. However, the needed test data to develop those robots is scarce, especially for the application of active 3D object detection, where no real data exists at all. This short paper counters this by introducing such an annotated dataset of real environments. The captured environments represent areas which are already in use in the field of robotic health care research. We further provide ground truth data within one room, for assessing SLAM algorithms running directly on a health care robot.
Model Predictive Control for Flexible Joint Robots
Oct 14, 2022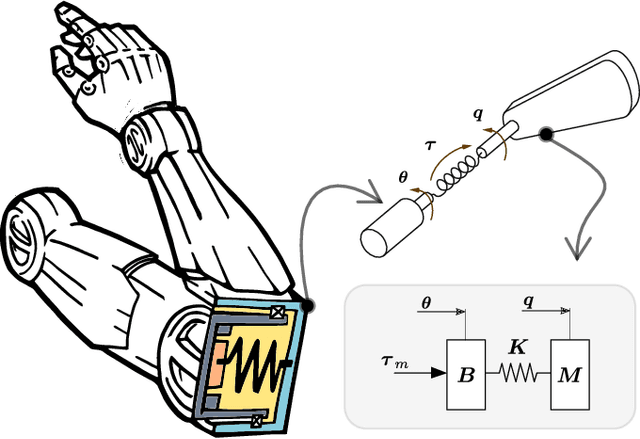
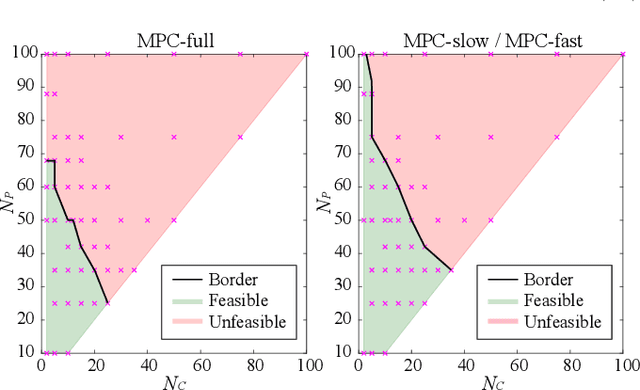

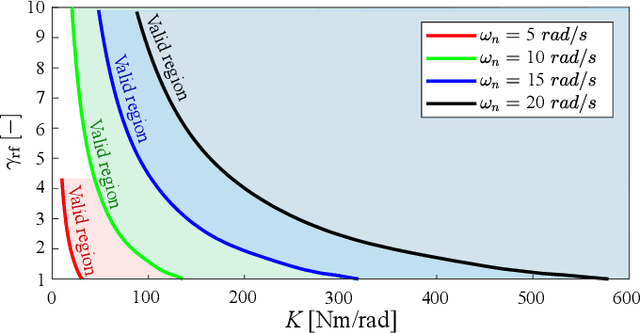
Modern Lightweight robots are constructed to be collaborative, which often results in a low structural stiffness compared to conventional rigid robots. Therefore, the controller must be able to handle the dynamic oscillatory effect mainly due to the intrinsic joint elasticity. Singular perturbation theory makes it possible to decompose the flexible joint dynamics into fast and slow subsystems. This model separation provides additional features to incorporate future knowledge of the jointlevel dynamical behavior within the controller design using the Model Predictive Control (MPC) technique. In this study, different architectures are considered that combine the method of Singular Perturbation and MPC. For Singular Perturbation, the parameters that influence the validity of using this technique to control a flexible-joint robot are investigated. Furthermore, limits on the input constraints for the future trajectory are considered with MPC. The position control performance and robustness against external forces of each architecture are validated experimentally for a flexible joint robot.