 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCare3D: An Active 3D Object Detection Dataset of Real Robotic-Care Environments
Oct 09, 2023



As labor shortage increases in the health sector, the demand for assistive robotics grows. However, the needed test data to develop those robots is scarce, especially for the application of active 3D object detection, where no real data exists at all. This short paper counters this by introducing such an annotated dataset of real environments. The captured environments represent areas which are already in use in the field of robotic health care research. We further provide ground truth data within one room, for assessing SLAM algorithms running directly on a health care robot.
Bounding Box Disparity: 3D Metrics for Object Detection With Full Degree of Freedom
Jul 08, 2022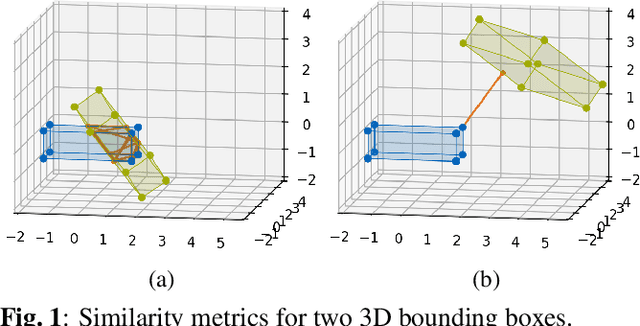
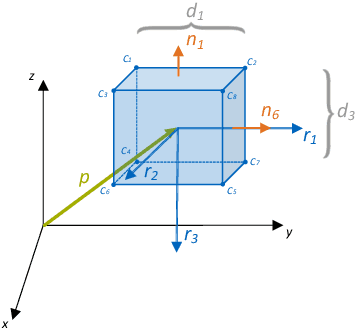
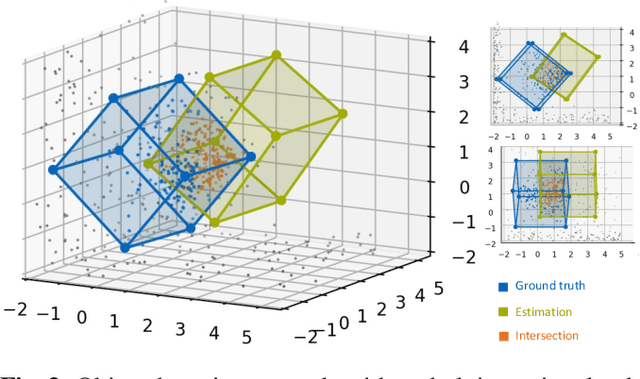
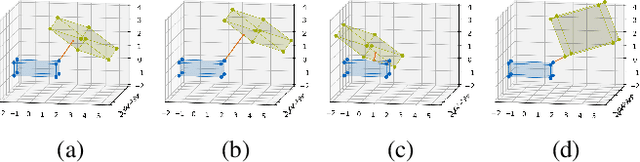
The most popular evaluation metric for object detection in 2D images is Intersection over Union (IoU). Existing implementations of the IoU metric for 3D object detection usually neglect one or more degrees of freedom. In this paper, we first derive the analytic solution for three dimensional bounding boxes. As a second contribution, a closed-form solution of the volume-to-volume distance is derived. Finally, the Bounding Box Disparity is proposed as a combined positive continuous metric. We provide open source implementations of the three metrics as standalone python functions, as well as extensions to the Open3D library and as ROS nodes.