 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeADL4D: Towards A Contextually Rich Dataset for 4D Activities of Daily Living
Feb 27, 2024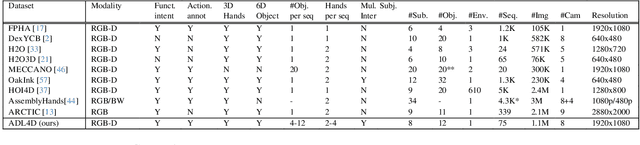
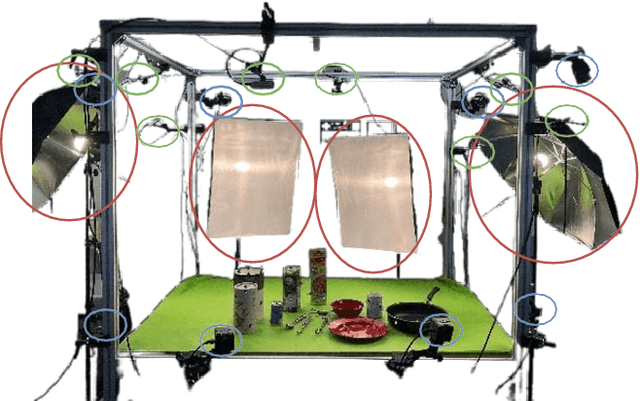


Hand-Object Interactions (HOIs) are conditioned on spatial and temporal contexts like surrounding objects, pre- vious actions, and future intents (for example, grasping and handover actions vary greatly based on objects proximity and trajectory obstruction). However, existing datasets for 4D HOI (3D HOI over time) are limited to one subject inter- acting with one object only. This restricts the generalization of learning-based HOI methods trained on those datasets. We introduce ADL4D, a dataset of up to two subjects inter- acting with different sets of objects performing Activities of Daily Living (ADL) like breakfast or lunch preparation ac- tivities. The transition between multiple objects to complete a certain task over time introduces a unique context lacking in existing datasets. Our dataset consists of 75 sequences with a total of 1.1M RGB-D frames, hand and object poses, and per-hand fine-grained action annotations. We develop an automatic system for multi-view multi-hand 3D pose an- notation capable of tracking hand poses over time. We inte- grate and test it against publicly available datasets. Finally, we evaluate our dataset on the tasks of Hand Mesh Recov- ery (HMR) and Hand Action Segmentation (HAS).
Care3D: An Active 3D Object Detection Dataset of Real Robotic-Care Environments
Oct 09, 2023



As labor shortage increases in the health sector, the demand for assistive robotics grows. However, the needed test data to develop those robots is scarce, especially for the application of active 3D object detection, where no real data exists at all. This short paper counters this by introducing such an annotated dataset of real environments. The captured environments represent areas which are already in use in the field of robotic health care research. We further provide ground truth data within one room, for assessing SLAM algorithms running directly on a health care robot.
Bounding Box Disparity: 3D Metrics for Object Detection With Full Degree of Freedom
Jul 08, 2022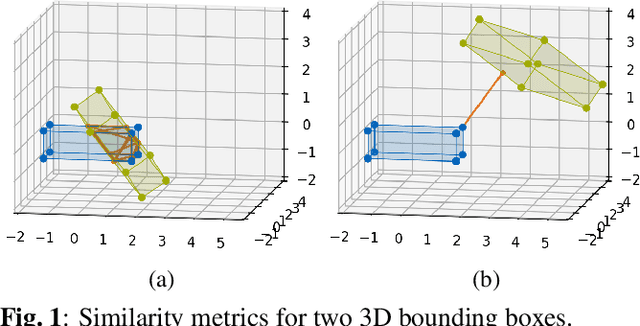
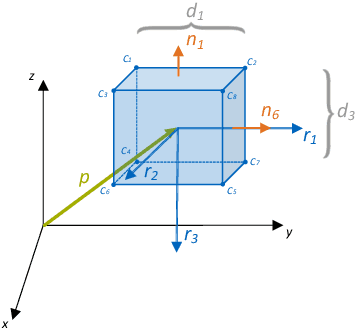
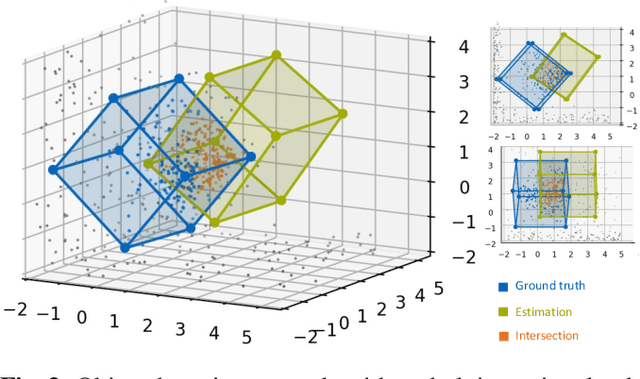
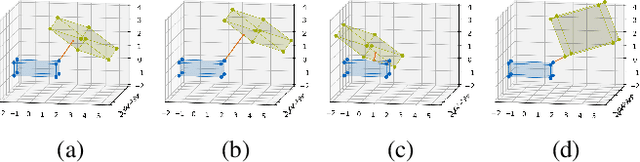
The most popular evaluation metric for object detection in 2D images is Intersection over Union (IoU). Existing implementations of the IoU metric for 3D object detection usually neglect one or more degrees of freedom. In this paper, we first derive the analytic solution for three dimensional bounding boxes. As a second contribution, a closed-form solution of the volume-to-volume distance is derived. Finally, the Bounding Box Disparity is proposed as a combined positive continuous metric. We provide open source implementations of the three metrics as standalone python functions, as well as extensions to the Open3D library and as ROS nodes.