 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrete Prototypical Memories for Federated Time Series Foundation Models
Apr 06, 2026Leveraging Large Language Models (LLMs) as federated learning (FL)-based time series foundation models offers a promising way to transfer the generalization capabilities of LLMs to time series data while preserving access to private data. However, the semantic misalignment between time-series data and the text-centric latent space of existing LLMs often leads to degraded performance. Meanwhile, the parameter-sharing mechanism in existing FL methods model heterogeneous cross-domain time-series data into a unified continuous latent space, which contradicts the fact that time-series semantics frequently manifest as discrete and recurring regimes. To address these limitations, we propose \textsc{FeDPM}, a federated framework for time-series foundation models based on discrete prototypical memories. Specifically, we learn local prototypical memory priors for intra-domain time-series data. We then align cross-domain memories to promote a unified discrete latent space and introduce a domain-specific memory update mechanism to balance shared and personalized prototypical knowledge. Extensive experiments demonstrate the efficiency and effectiveness of \textsc{FeDPM}. The code is publicly available at https://anonymous.4open.science/r/FedUnit-64D1.
WaveSFNet: A Wavelet-Based Codec and Spatial--Frequency Dual-Domain Gating Network for Spatiotemporal Prediction
Mar 24, 2026Spatiotemporal predictive learning aims to forecast future frames from historical observations in an unsupervised manner, and is critical to a wide range of applications. The key challenge is to model long-range dynamics while preserving high-frequency details for sharp multi-step predictions. Existing efficient recurrent-free frameworks typically rely on strided convolutions or pooling for sampling, which tends to discard textures and boundaries, while purely spatial operators often struggle to balance local interactions with global propagation. To address these issues, we propose WaveSFNet, an efficient framework that unifies a wavelet-based codec with a spatial--frequency dual-domain gated spatiotemporal translator. The wavelet-based codec preserves high-frequency subband cues during downsampling and reconstruction. Meanwhile, the translator first injects adjacent-frame differences to explicitly enhance dynamic information, and then performs dual-domain gated fusion between large-kernel spatial local modeling and frequency-domain global modulation, together with gated channel interaction for cross-channel feature exchange. Extensive experiments demonstrate that WaveSFNet achieves competitive prediction accuracy on Moving MNIST, TaxiBJ, and WeatherBench, while maintaining low computational complexity. Our code is available at https://github.com/fhjdqaq/WaveSFNet.
PFGNet: A Fully Convolutional Frequency-Guided Peripheral Gating Network for Efficient Spatiotemporal Predictive Learning
Feb 24, 2026Spatiotemporal predictive learning (STPL) aims to forecast future frames from past observations and is essential across a wide range of applications. Compared with recurrent or hybrid architectures, pure convolutional models offer superior efficiency and full parallelism, yet their fixed receptive fields limit their ability to adaptively capture spatially varying motion patterns. Inspired by biological center-surround organization and frequency-selective signal processing, we propose PFGNet, a fully convolutional framework that dynamically modulates receptive fields through pixel-wise frequency-guided gating. The core Peripheral Frequency Gating (PFG) block extracts localized spectral cues and adaptively fuses multi-scale large-kernel peripheral responses with learnable center suppression, effectively forming spatially adaptive band-pass filters. To maintain efficiency, all large kernels are decomposed into separable 1D convolutions ($1 \times k$ followed by $k \times 1$), reducing per-channel computational cost from $O(k^2)$ to $O(2k)$. PFGNet enables structure-aware spatiotemporal modeling without recurrence or attention. Experiments on Moving MNIST, TaxiBJ, Human3.6M, and KTH show that PFGNet delivers SOTA or near-SOTA forecasting performance with substantially fewer parameters and FLOPs. Our code is available at https://github.com/fhjdqaq/PFGNet.
Aeolus: A Multi-structural Flight Delay Dataset
Oct 30, 2025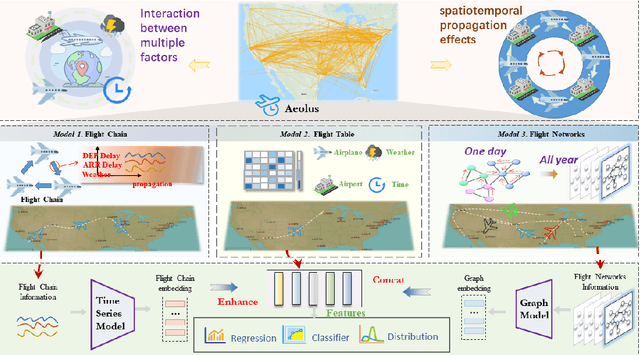
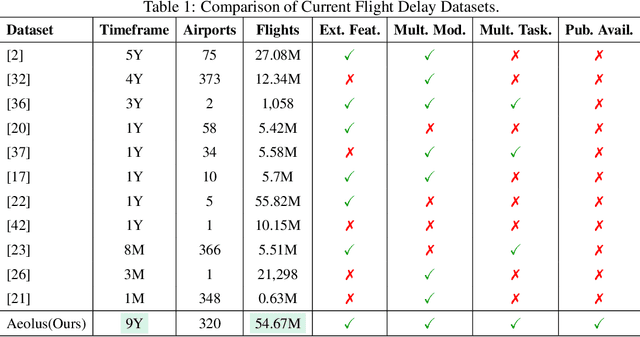
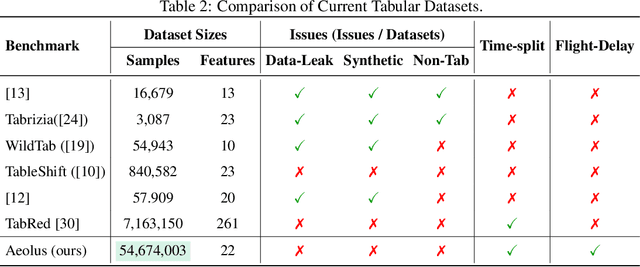
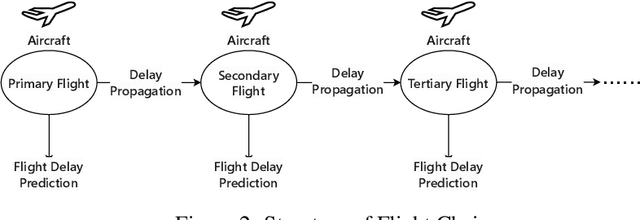
We introduce Aeolus, a large-scale Multi-modal Flight Delay Dataset designed to advance research on flight delay prediction and support the development of foundation models for tabular data. Existing datasets in this domain are typically limited to flat tabular structures and fail to capture the spatiotemporal dynamics inherent in delay propagation. Aeolus addresses this limitation by providing three aligned modalities: (i) a tabular dataset with rich operational, meteorological, and airportlevel features for over 50 million flights; (ii) a flight chain module that models delay propagation along sequential flight legs, capturing upstream and downstream dependencies; and (iii) a flight network graph that encodes shared aircraft, crew, and airport resource connections, enabling cross-flight relational reasoning. The dataset is carefully constructed with temporal splits, comprehensive features, and strict leakage prevention to support realistic and reproducible machine learning evaluation. Aeolus supports a broad range of tasks, including regression, classification, temporal structure modeling, and graph learning, serving as a unified benchmark across tabular, sequential, and graph modalities. We release baseline experiments and preprocessing tools to facilitate adoption. Aeolus fills a key gap for both domain-specific modeling and general-purpose structured data research.Our source code and data can be accessed at https://github.com/Flnny/Delay-data
GeoSR: Cognitive-Agentic Framework for Probing Geospatial Knowledge Boundaries via Iterative Self-Refinement
Aug 06, 2025



Recent studies have extended the application of large language models (LLMs) to geographic problems, revealing surprising geospatial competence even without explicit spatial supervision. However, LLMs still face challenges in spatial consistency, multi-hop reasoning, and geographic bias. To address these issues, we propose GeoSR, a self-refining agentic reasoning framework that embeds core geographic principles -- most notably Tobler's First Law of Geography -- into an iterative prediction loop. In GeoSR, the reasoning process is decomposed into three collaborating agents: (1) a variable-selection agent that selects relevant covariates from the same location; (2) a point-selection agent that chooses reference predictions at nearby locations generated by the LLM in previous rounds; and (3) a refine agent that coordinates the iterative refinement process by evaluating prediction quality and triggering further rounds when necessary. This agentic loop progressively improves prediction quality by leveraging both spatial dependencies and inter-variable relationships. We validate GeoSR on tasks ranging from physical-world property estimation to socioeconomic prediction. Experimental results show consistent improvements over standard prompting strategies, demonstrating that incorporating geostatistical priors and spatially structured reasoning into LLMs leads to more accurate and equitable geospatial predictions. The code of GeoSR is available at https://github.com/JinfanTang/GeoSR.
Technical Report for Egocentric Mistake Detection for the HoloAssist Challenge
Jun 06, 2025



In this report, we address the task of online mistake detection, which is vital in domains like industrial automation and education, where real-time video analysis allows human operators to correct errors as they occur. While previous work focuses on procedural errors involving action order, broader error types must be addressed for real-world use. We introduce an online mistake detection framework that handles both procedural and execution errors (e.g., motor slips or tool misuse). Upon detecting an error, we use a large language model (LLM) to generate explanatory feedback. Experiments on the HoloAssist benchmark confirm the effectiveness of our approach, where our approach is placed second on the mistake detection task.
Evaluating Temporal Plasticity in Foundation Time Series Models for Incremental Fine-tuning
Apr 20, 2025



Time series foundation models excel at diverse time series forecasting tasks, but their capacity for continuous improvement through incremental learning remains unexplored. We present the first comprehensive study investigating these models' temporal plasticity - their ability to progressively enhance performance through continual learning while maintaining existing capabilities. Through experiments on real-world datasets exhibiting distribution shifts, we evaluate both conventional deep learning models and foundation models using a novel continual learning framework. Our findings reveal that while traditional models struggle with performance deterioration during incremental fine-tuning, foundation models like Time-MoE and Chronos demonstrate sustained improvement in predictive accuracy. This suggests that optimizing foundation model fine-tuning strategies may be more valuable than developing domain-specific small models. Our research introduces new evaluation methodologies and insights for developing foundation time series models with robust continuous learning capabilities.
Memory-based Ensemble Learning in CMR Semantic Segmentation
Feb 13, 2025Existing models typically segment either the entire 3D frame or 2D slices independently to derive clinical functional metrics from ventricular segmentation in cardiac cine sequences. While performing well overall, they struggle at the end slices. To address this, we leverage spatial continuity to extract global uncertainty from segmentation variance and use it as memory in our ensemble learning method, Streaming, for classifier weighting, balancing overall and end-slice performance. Additionally, we introduce the End Coefficient (EC) to quantify end-slice accuracy. Experiments on ACDC and M\&Ms datasets show that our framework achieves near-state-of-the-art Dice Similarity Coefficient (DSC) and outperforms all models on end-slice performance, improving patient-specific segmentation accuracy.
ForecastGrapher: Redefining Multivariate Time Series Forecasting with Graph Neural Networks
May 28, 2024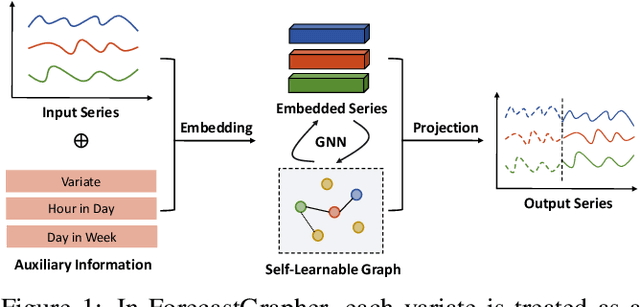
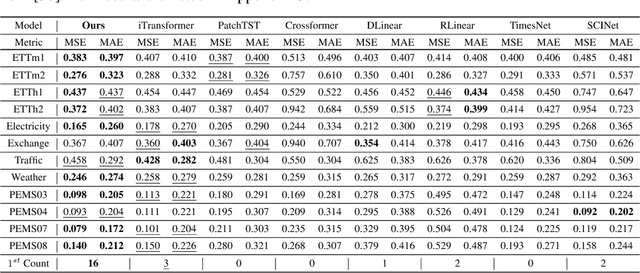
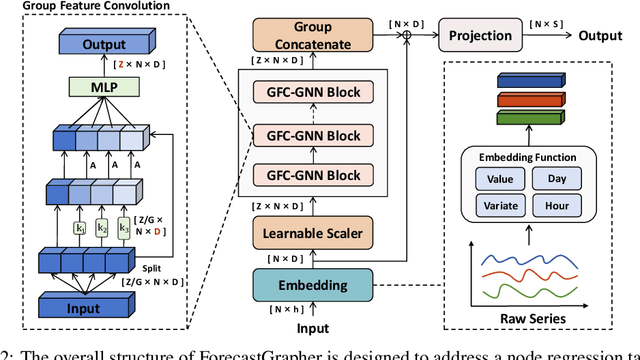
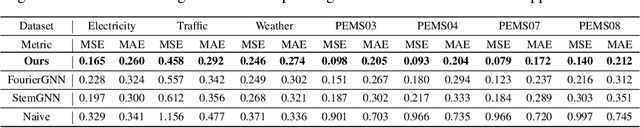
The challenge of effectively learning inter-series correlations for multivariate time series forecasting remains a substantial and unresolved problem. Traditional deep learning models, which are largely dependent on the Transformer paradigm for modeling long sequences, often fail to integrate information from multiple time series into a coherent and universally applicable model. To bridge this gap, our paper presents ForecastGrapher, a framework reconceptualizes multivariate time series forecasting as a node regression task, providing a unique avenue for capturing the intricate temporal dynamics and inter-series correlations. Our approach is underpinned by three pivotal steps: firstly, generating custom node embeddings to reflect the temporal variations within each series; secondly, constructing an adaptive adjacency matrix to encode the inter-series correlations; and thirdly, augmenting the GNNs' expressive power by diversifying the node feature distribution. To enhance this expressive power, we introduce the Group Feature Convolution GNN (GFC-GNN). This model employs a learnable scaler to segment node features into multiple groups and applies one-dimensional convolutions with different kernel lengths to each group prior to the aggregation phase. Consequently, the GFC-GNN method enriches the diversity of node feature distribution in a fully end-to-end fashion. Through extensive experiments and ablation studies, we show that ForecastGrapher surpasses strong baselines and leading published techniques in the domain of multivariate time series forecasting.
NuwaTS: a Foundation Model Mending Every Incomplete Time Series
May 27, 2024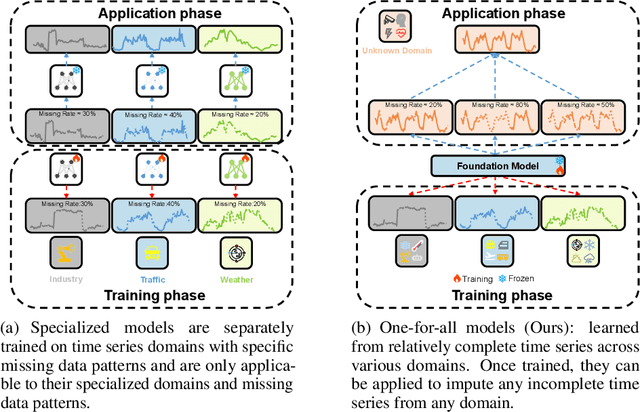

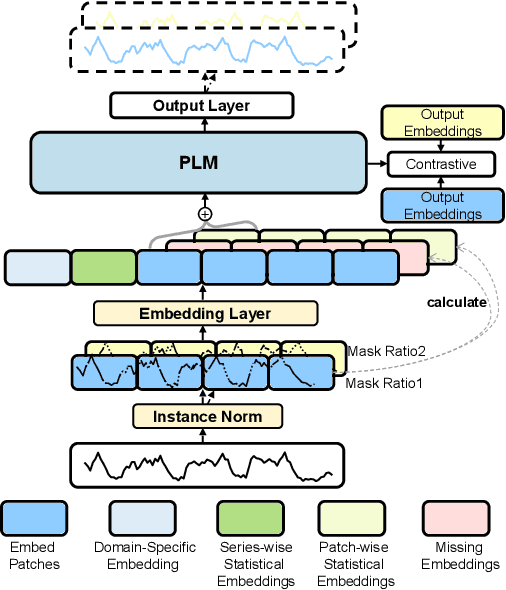
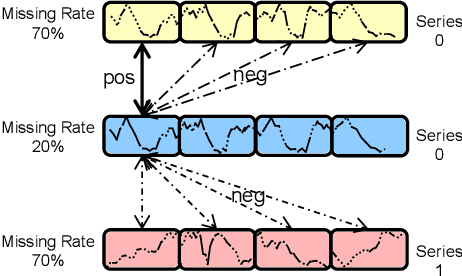
Time series imputation plays a crucial role in various real-world systems and has been extensively explored. Models for time series imputation often require specialization, necessitating distinct designs for different domains and missing patterns. In this study, we introduce NuwaTS, a framework to repurpose Pre-trained Language Model (PLM) for general time series imputation. Once trained, this model can be applied to imputation tasks on incomplete time series from any domain with any missing patterns. We begin by devising specific embeddings for each sub-series patch of the incomplete time series. These embeddings encapsulate information about the patch itself, the missing data patterns within the patch, and the patch's statistical characteristics. To enhance the model's adaptability to different missing patterns, we propose a contrastive learning approach to make representations of the same patch more similar across different missing patterns. By combining this contrastive loss with the missing data imputation task, we train PLMs to obtain a one-for-all imputation model. Furthermore, we utilize a plug-and-play layer-wise fine-tuning approach to train domain-specific models. Experimental results demonstrate that leveraging a dataset of over seventeen million time series from diverse domains, we obtain a one-for-all imputation model which outperforms existing domain-specific models across various datasets and missing patterns. Additionally, we find that NuwaTS can be generalized to other time series tasks such as forecasting. Our codes are available at https://github.com/Chengyui/NuwaTS.